





























38
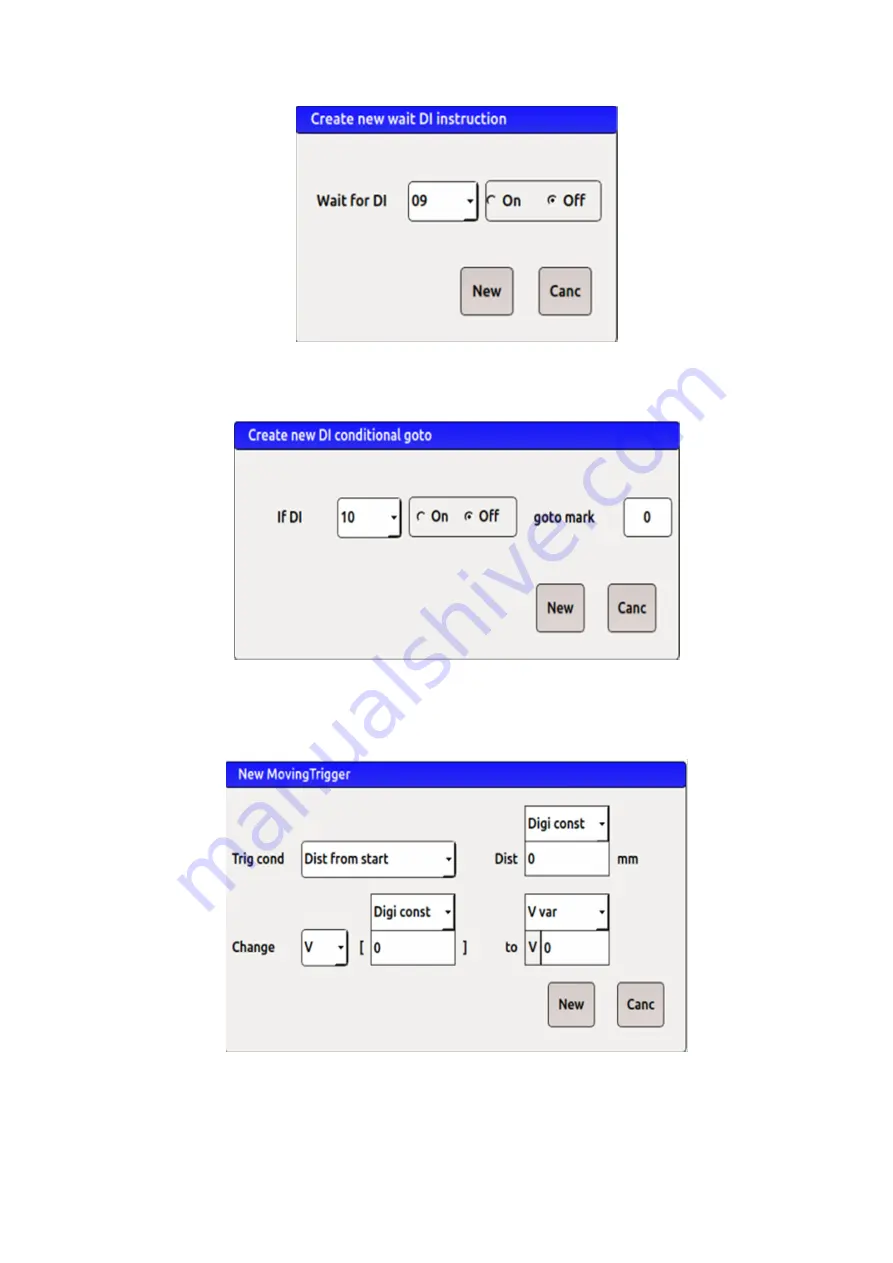
Figure 3-30 Waiting for IO input
3) IO input jump
When the target input port meets the set conditions, the program automatically jumps
to the corresponding mark.
Figure 3-31 IO input jump
4) Trigger actions during exercise
The instruction is added before the motion instruction. Corresponding actions can be
executed during the movement of the motion instruction, for example: IO output, variable
change, etc.
Figure 3-32 Trigger action during movement
5) Trigger stop during exercise
When the motion command is running, the conditions set in the "trigger stop"
command are satisfied, and the robot can stop the motion in the set way.







































































