





























38-
flag. The gripping direction depends on the parameterization of the selected grip preset. The end of the grip-
ping process or a possible error can be determined by continuously checking the gripping state. If the config-
ured NO PART LIMIT position is reached, no part was gripped and the base jaws remain in this position.
If an error has occurred during gripping, it must be acknowledged as described in chapter 9.9
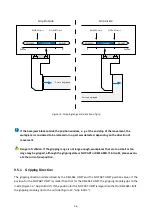
EN = 1, HOME = 0
CMD = 1
INDEX = [Grip Index]
HOLDING = 1 ?
no
yes
Part gripped
Base Jaws
moving
NO PART = 1 ?
no
yes
No part detected
FAULT = 1 ?
no
yes
Error handling
Acknowledge error
Figure 15: Gripping program sequence
9.8
Release Part
In order to release a previously gripped workpiece or to open the fingers after an unsuccessful grip, the pro-
gram sequence in Figure 16 must be executed. Releasing is initiated by resetting the CMD flag to 0. The
direction of movement depends on the selected grip preset. The grip index value should not be changed
during holding (grip index during release = grip index during gripping).
To switch between different grip presets, first release the workpiece and then change the grip index
value.
The workpiece is considered released (state transition from HOLDING to RELEASED) as soon as the base jaws
have reached the RELEASE LIMIT position. The base jaws remain in this position, position-controlled but with
reduced force.






































































