




























Menu 14
Parameter
structure
Keypad and
display
Parameter
x.00
Parameter
description format
Advanced parameter
descriptions
Macros
Serial comms
protocol
Electronic
nameplate
Performance RFC mode
248
Unidrive SP Advanced User Guide
www.controltechniques.com Issue Number: 10
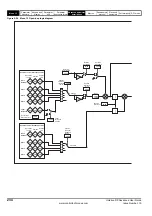
Subject to the limits the PID controller output is given by
output = error x [P + I/s + Ds/(0.064s + 1)]
Where:
error = reference - feedback
P = proportional gain = Pr
14.10
I = integral gain = Pr
14.11
D = differential gain = Pr
14.12
Therefore with an error of 100% and P = 1.000 the output produced by the proportional term is 100%. With an error of 100% and I = 1.000 the output
produced by the integral term will increase linearly by 100% every second. With an error that is increasing by 100% per second and D = 1.000 the
output produced by the D term will be 100%.
This parameter defines the time taken for the reference input to ramp from 0 to 100.0% following a 0 to 100% step change in input.
14.01
PID output
Drive modes
Open-loop, Closed-loop vector, Servo, Regen
Coding
Bit
SP
FI
DE Txt VM DP ND RA NC NV PT
US RW BU PS
2
1
1
1
Range
Open-loop, Closed-loop vector, Servo,
Regen
±100.00 %
Update rate
4ms write
14.02
PID main reference source
14.03
PID reference source
14.04
PID feedback source
Drive modes
Open-loop, Closed-loop vector, Servo, Regen
Coding
Bit
SP
FI
DE Txt VM DP
ND
RA NC NV PT US RW BU PS
2
1
1
1
1
Range
Open-loop, Closed-loop vector, Servo,
Regen
Pr
0.00
to Pr
21.51
Default
Open-loop, Closed-loop vector, Servo,
Regen
Pr
0.00
Update rate
Read on reset
14.05
PID reference source invert
14.06
PID feedback source invert
Drive modes
Open-loop, Closed-loop vector, Servo, Regen
Coding
Bit
SP
FI
DE Txt VM DP ND RA NC NV
PT
US RW BU
PS
1
1
1
Default
Open-loop, Closed-loop vector, Servo,
Regen
0
Update rate
4ms read
14.07
PID reference slew rate limit
Drive modes
Open-loop, Closed-loop vector, Servo, Regen
Coding
Bit
SP
FI
DE Txt VM DP
ND
RA NC NV PT US RW BU PS
1
1
1
1
Range
Open-loop, Closed-loop vector, Servo,
Regen
0.0 to 3,200.0 s
Default
Open-loop, Closed-loop vector, Servo,
Regen
0.0
Update rate
Background read
Summary of Contents for unidrive sp
Page 419: ......
Page 420: ...0471 0002 10 ...







































































