




























Parameter
structure
Keypad and
display
Parameter
x.00
Parameter
description format
Advanced parameter
descriptions
Macros
Serial comms
protocol
Electronic
nameplate
Performance RFC mode
Menus 15 to 17
SM-Uni Enc Pl
Unidrive SP Advanced User Guide
259
Issue Number: 10 www.controltechniques.com
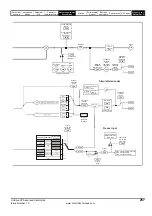
Example:
A 1024 line digital encoder produces 4096 counts per revolution, and so the position is represented by the bits in the shaded area only.
When the feedback device rotates by more than one revolution, the revolutions in Pr
x.04
increment or decrement in the form of a sixteen bit roll-over
counter. If an absolute position feedback is used the position is initialized at power-up with the absolute position.
If a linear encoder is used the turns information is used to represent the movement by the number of poles defined by Pr
5.11
. Therefore if the number
of poles is set to two, one revolution is the movement by one pole pitch.
It may be required that Pr
x.04
, Pr
x.05
and Pr
x.06
are reset to zero this can be carried out by changing the encoder type Pr
x.15
with all counters
being reset.
An incremental digital encoder may have a marker channel and when this channel becomes active (rising edge in the forward direction and falling
edge in reverse) it may be used to reset the encoder position and set the marker flag (Pr
x.07
= 0), or just to set the marker flag (Pr
x.07
= 1). When
the position is reset by the marker, Pr
x.05
and Pr
x.06
are reset to zero.
The marker flag is set each time the marker input becomes active, but it is not reset by the Solutions Module, and so this must be done by the user.
The marker function only operates when Ab, Fd, Fr, Ab.SErvo, Fd.SErvo, Fr.SErvo, SC.SErvo type encoders are selected with Pr
x.15.
This parameter has a different function depending on the type of encoder selected with Pr
x.15
and Pr
x.16
.
Ab, Fd, Fr, Ab.SErvo, Fd.SErvo, Fr.SErvo, SC, SC.SErvo
It is sometimes desirable to mask off the most significant bits of the revolution counter with these types of encoders. This does not have to be done for
the drive to function correctly. If Pr
x.09
is zero the revolution counter (Pr
x.04
) is held at zero. If Pr
x.09
has any other value it defines the maximum
number of the revolution counter before it is reset to zero.
Example, if Pr
x.09
=5, then Pr
x.04
counts up to 31 before being reset. If Pr
x.09
is greater than 16 the number of turns bits is 16 and Pr
x.04
counts
up to 65535 before being reset.
SC.HiPEr, SC.EndAt, SC.SSI and Pr x.16 = 1 or 2 (Rotary encoder)
Pr x.09 must contain the number of bits in the comms message used to give the multi-turn information. For a single turn comms encoder, Pr
x.09
must
be set to zero. As well as setting the number of comms turns bits this parameter also sets up a mask on the turns displayed in Pr
x.04
as described
above.
With SC.HiPEr or SC.EndAt encoders it is possible for this parameter to be obtained automatically from the encoder (see Pr
x.18
). If Pr
x.09
is greater
than 16 the number of turns bits is 16.
SC.HiPEr, SC.EndAt, SC.SSI and x.16 = 0 (Linear encoder)
When a linear encoder is selected no mask is placed on the turns information displayed in Pr
x.09
, and so this parameter always displays the turns
information as a full 16 bit value with a maximum of 65535. Linear SINCOS encoders with comms are normally specified with a length for each sine
wave period and the length for the least significant bit of the position in the comms message. Pr
x.09
should be set up with the ratio between these
two lengths so that the Solutions Module can determine the encoder position during initialisation.
The Linear encoder comms to sine wave ratio is defined as follows:
With SC.HiPEr or SC.EndAt encoders it is possible for this parameter to be obtained automatically from the encoder (see Pr
x.18
).
EndAt, SSI
Pr
x.09
must contain the number of bits in the comms message used to give the multi-turn information. For a single turn comms encoder, Pr
x.09
must be set to zero. As well as setting the number of comms turns bits this parameter also sets up a mask on the turns displayed in Pr
x.04
as
described above. It is possible for this parameter to be obtained automatically from the encoder (see Pr
x.18
). If Pr
x.09
is greater than 16 the number
of turns bit is 16.
47 32 31 20 19 16 15 0
Revolutions
Position
Fine position
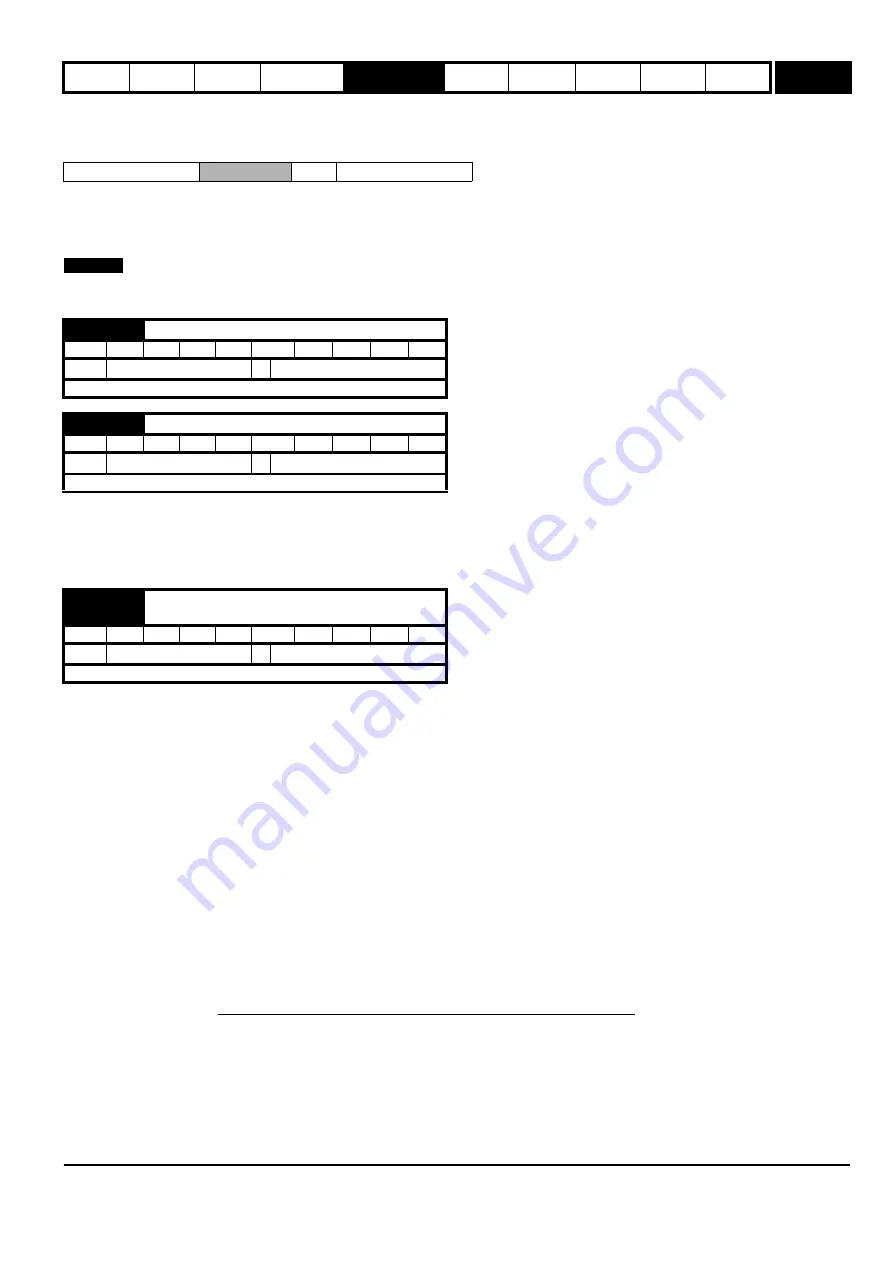
x.07
Marker position reset disable
RW
Bit
US
Ú
OFF (0) or On (1)
Ö
OFF (0)
Update rate: Background read
x.08
Marker flag
RW
Bit
NC
Ú
OFF (0) or On (1)
Ö
OFF (0)
Update rate: 4ms write
x.09
Encoder turns/ linear encoder comms to sine wave
ratio
RW
Uni
NC
US
Ú
0 to 255
Ö
16
Update rate: Background read
Linear encoder comms
to sine wave ratio
=
Length for sine wave period
Length representing the LS bit of the position in the comms message
NOTE
Summary of Contents for unidrive sp
Page 419: ......
Page 420: ...0471 0002 10 ...







































































