





























Parameter
structure
Keypad and
display
Parameter
x.00
Parameter
description format
Advanced parameter
descriptions
Macros
Serial comms
protocol
Electronic
nameplate
Performance RFC mode
Menu 3
All modes
Unidrive SP Advanced User Guide
73
Issue Number: 10 www.controltechniques.com
All SINCOS encoders and encoders using communications must be initialized before their position data can be used. The encoder is automatically
initialized at power-up, after trips Enc1 to Enc8 or Enc11 to Enc17 are reset, and when the initialization (Pr
3.47
) is set to 1. If the encoder is not
initialized or the initialisation is invalid the drive initiates trip Enc7.
Ab, Fd, Fr, Ab Servo, Fd Servo, Fr Servo - Drive encoder termination select
The terminations may be enabled/disabled by this parameter as follows:
SC - Drive encoder termination select
The terminations may be enabled/disabled by this parameter as follows:
SC.Hiper, SC.EnDat, SC.SSI - Rotary encoder select
If Pr
3.39
is set to 1 or 2 the encoder is a rotary encoder and the following apply:
1. Pr
3.33
defines the number of turns bits in the comms message from the encoder and a mask is applied to Pr
3.28
to remove turns bits in excess
of those provided in the encoder comms position.
2. The number of encoder lines per revolution defined by Pr
3.34
is forced to a power of two between 2 and 32768.
3. Pr
3.35
defines the number of comms bits used to define a single turn.
If Pr
3.39
is set to 0 the encoder is a linear encoder and the following apply:
1. Pr
3.33
defines the ratio between the length of a sine wave period and the length of the least significant comms bit.
2. No mask is applied to the turns displayed in Pr
3.28.
3. Pr
3.35
defines the number of comms bits used to give the whole position value.
If the position feedback device is SC.Hiper or SC.EnDat it is possible for the drive to set up this parameter automatically from information obtained
from the encoder (see Pr
3.41
).
EnDat, SSI - Comms only encoder mode
If this parameter is set to 1 or 2 the drive always takes the complete absolute position for these comms only type encoders. The turns (Pr
3.28
),
position (Pr
3.29
) and fine position (Pr
3.30
) will be an exact representation of the position from the encoder. If the encoder does not provide 16bits of
turns information, the internal representation of the turns used by the position controller in Menu 13 and functions within the SM-Applications Module
such as the Advanced Position Controller, rolls over at the maximum position value from the encoder. This jump in position is likely to cause unwanted
effects. As the SSI format does not include any error checking it is not possible for the drive to detect if the position data has been corrupted by noise
on the encoder signals. The benefit of using the absolute position directly from an SSI encoder is that even if the encoder communications are
disturbed by noise and position errors occur, the position will always recover the correct position after the disturbance has ceased. The EnDat format
includes a CRC that is used by the drive to detect corrupted data, and so if the position data has been corrupted the drive uses the previous correct
data until new uncorrupted data is received.
It should be noted that if the encoder does not provide at least 6 bits of turns information the speed feedback used to generate the drive over speed
trip is incorrect when the position rolls over or under the maximum value. Therefore this mode should not be used with encoders that do not provide
this turns information unless the encoder is not going to pass through the maximum position.
If this parameter is set to 0 the drive only takes the absolute position directly from the encoder during initialization. The change of position over each
sample is then used to determine the current position. This method always gives 16 bits of turns information that can be used without jumps in
position by the position controller in Menu13 and SM-Applications modules etc. This method will only operate correctly if the change of position over
any 250
μ
s period is less than 0.5 of a turn, or else the turns information will be incorrect. The turns can then only be corrected by re-initializing the
encoder. Under normal operating conditions and at a maximum speed of 40,000rpm the maximum change of position is less than 0.5 turns, however,
if noise corrupts the data from an SSI encoder it is possible to have apparent large change of position, and this can result in the turns information
becoming and remaining corrupted until the encoder is re-initialized.
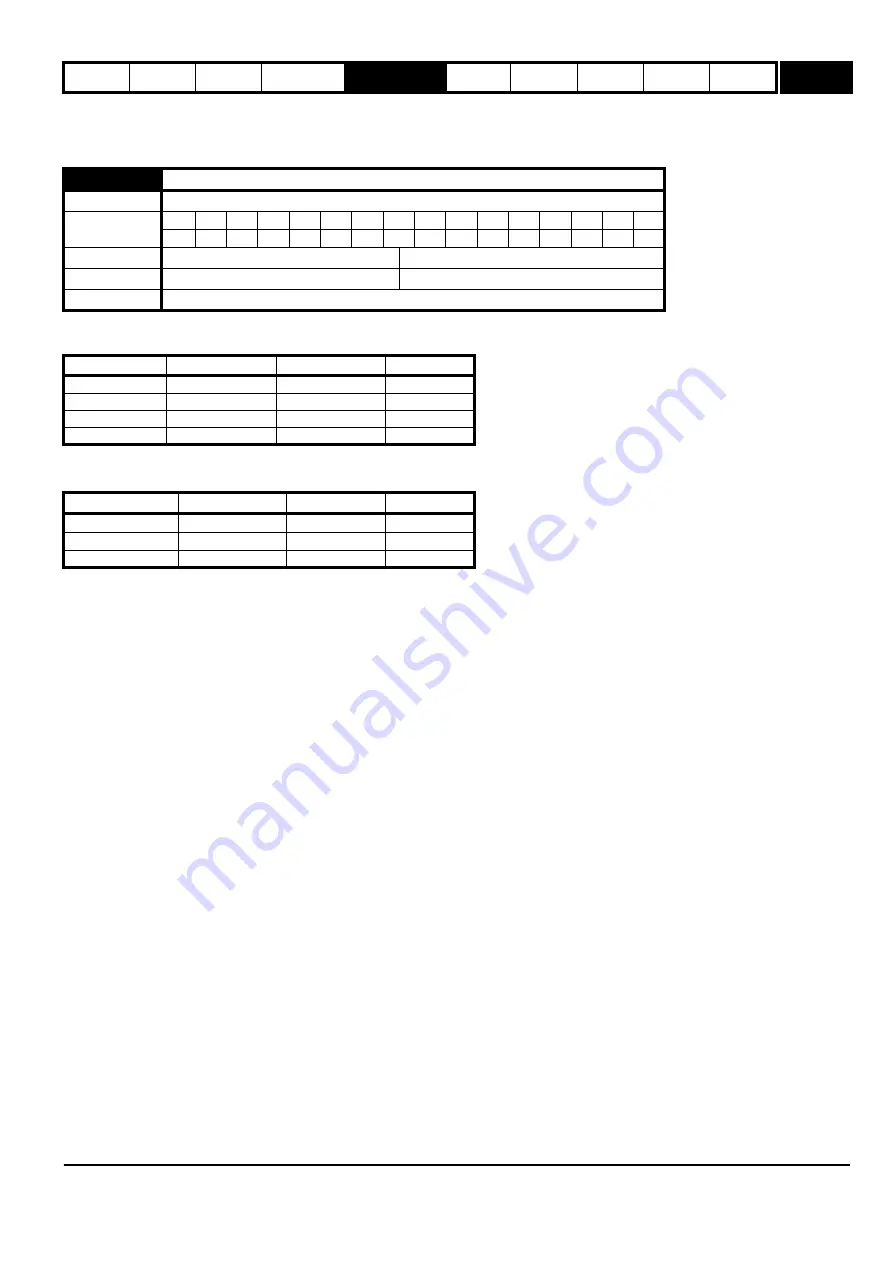
3.39
Drive encoder termination select / Rotary encoder select / Comms only encoder mode
Drive modes
Open-loop, Closed-loop vector, Servo
Coding
Bit
SP
FI
DE
Txt
VM
DP
ND
RA
NC
NV
PT
US RW BU
PS
1
1
Range
Open-loop, Closed-loop vector, Servo
0 to 2
Default
Open-loop, Closed-loop vector, Servo
1
Update rate
Background read
Encoder input
Pr 3.39=0
Pr 3.39=1
Pr 3.39=2
A-A\
Disabled
Enabled
Enabled
B-B\
Disabled
Enabled
Enabled
Z-Z\
Disabled
Disabled
Enabled
U-U\, V-V\, W-W\
Enabled
Enabled
Enabled
Encoder input
Pr 3.39=0
Pr 3.39=1
Pr 3.39=2
A-A\
Disabled
Enabled
Enabled
B-B\
Disabled
Enabled
Enabled
Z-Z\
Disabled
Disabled
Enabled
Summary of Contents for unidrive sp
Page 419: ......
Page 420: ...0471 0002 10 ...







































































