





























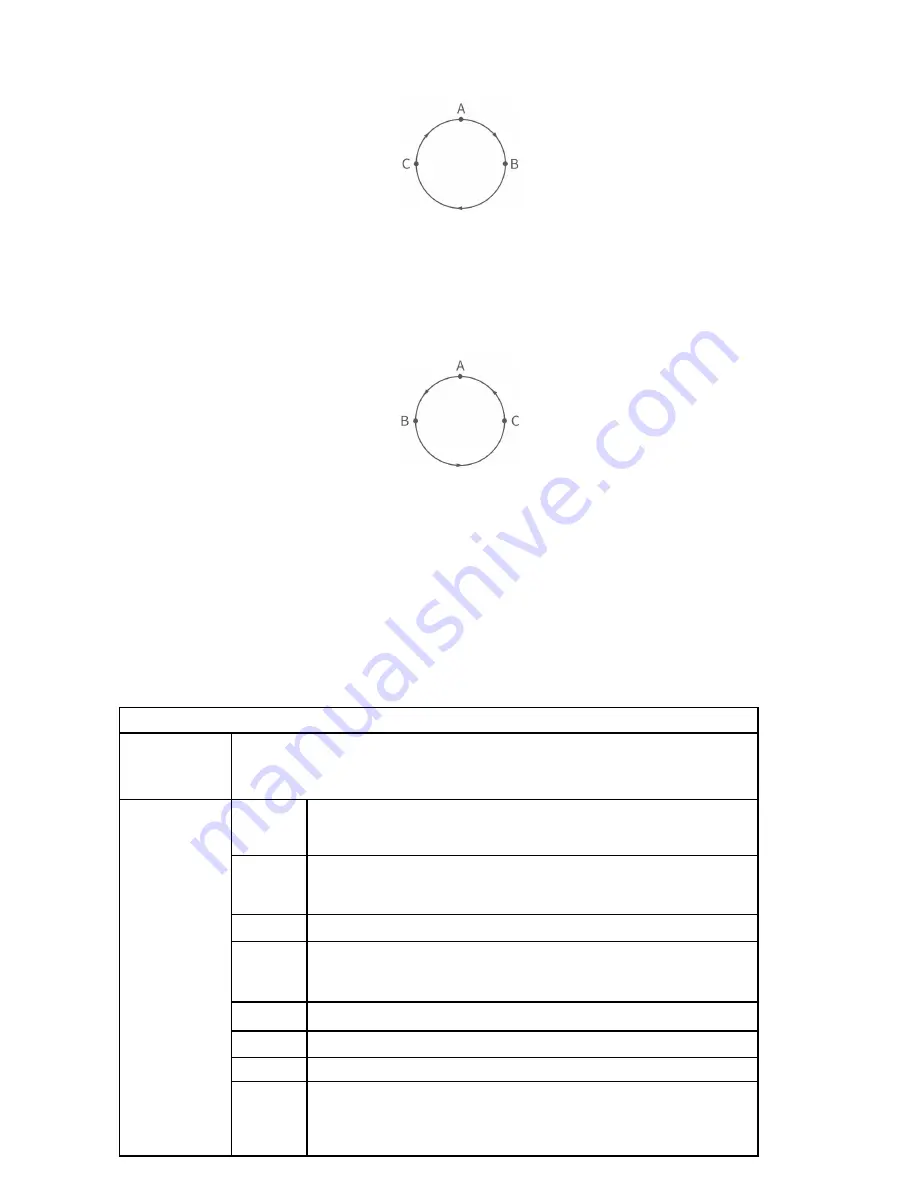
If the positions of point B and C are swapped, point B is (350, -
50,400,180,0,0), point C is (350,50,400,180,0,0), the robotic arm will
draw a circle in a counterclockwise direction. The trajectory of the
robotic arm is as follows:
set_servo_angle interface: see Table 2.1.
set_position interface: see Table 2.2.
The move_circle interface is described in Table 2.4:
Table 2.4 move_circle description
move_circle
Description
This motion calculates the trajectory of a space circle based on three-
point coordinates. The three-point coordinates are (current starting point,
pose 1, pose 2)
Parameter
pose1
Cartesian coordinates
[x(mm), y(mm), z(mm), roll(rad or °), pitch(rad or °), yaw(rad
or °)];
pose2
Cartesian coordinates
[x(mm), y(mm), z(mm), roll(rad or °), pitch(rad or °), yaw(rad
or °)];
percent
Percentage of arc moved
is_radia
n
If is_radian = True, the unit of roll / pitch / yaw is rad;
If is_radian = False, the unit of roll / pitch / yaw is °;
speed
TCP motion speed (mm / s, rad / s);
mvacc
TCP motion acceleration (mm / s
2
, rad / s
2
);
mvtime
0, reserved;
wait
If wait = True, wait for the current commands to be sent before
sending the next commands;
If wait = False, send the next commands directly;







































































