





















33
joints
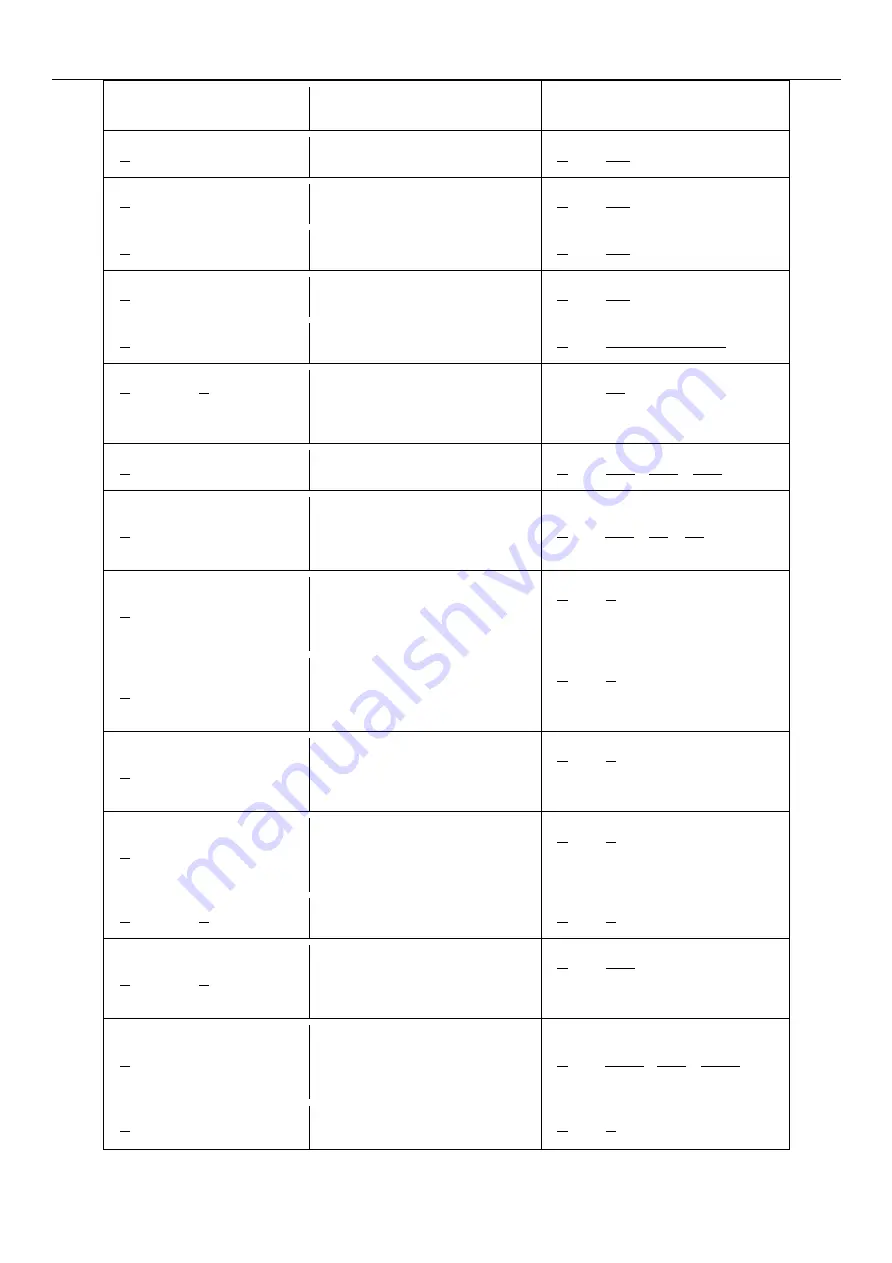
#
n
P2201\n
Get the device name
$
n
ok V
3.2
\n
#
n
P2202\n
Get the hardware version
$
n
ok V
1.2
\n
#
n
P2203\n
Get the software version
$
n
ok V
3.2
\n
#
n
P2204\n
Get the API version
$
n
ok V
3.2
\n
#
n
P2205\n
Get the UID
$
n
ok V
0123456789AB
\n
#
n
P2206 N
0
\n
Get the angle of number 0
joint (0~2)
$n ok V
80
\n
#
n
P2220\n
Get current coordinates
$
n
ok X
100
Y
100
Z
100
\n
#
n
P2221\n
Get current polar
coordinates
$
n
ok S
100
R
90
H
80
\n
#
n
P2231\n
Get the status of pump
$
n
ok V
1
\n (0 stop, 1 working,
2 grabbing things)
#
n
P2232\n
Get the status of gripper
$
n
ok V
1
\n (0 stop, 1 working,
2 grabbing things)
#
n
P2233\n
Get the status of limited
switch
$
n
ok V
1
(1 triggered, 0
untriggered)
#
n
P2234\n
Get the status of power
connection
$
n
ok V
1
(1 connected, 0
unconnected)
#
n
P2240 N
1
\n
Get the status of digital IO
$
n
ok V
1
\n (1 High, 0 Low)
#
n
P2241 N
1
\n
Get the status of analog IO
$
n
ok V
295
\n (return the data
of ADC)
#
n
P2242\n
Get the default value of
AS5600 in each joint
$
n
ok B
2401
L
344
R
1048
\n
#
n
P2400\n
Check current status
$
n
ok V
1
\n (0: normal; 1: laser;
Summary of Contents for uArm Swift Pro
Page 1: ......
Page 3: ...3 1 Introduction 28 2 Example 28 3 Commands tbd 28 UARM COMMUNITY 40 RELEASE NOTE 40...
Page 5: ...5 2 Reference Frame...
Page 8: ...8 4 Mounting...
Page 9: ...9...
Page 11: ...11 6 Extension Description...
Page 12: ...12 Details of 30P Base Extension...
Page 18: ...18 Now you are able to send the command to the uArm Let s send G0 X250 Y0 Z130 F10000...
Page 21: ...21 Set the parameter of serial monitor in the right bottom like the picture below...







































































