





























X90 mobile modules
X90 mobile system User's manual V 1.20 - Translation of the original manual
207
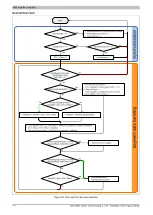
Relationship between OutputSequence and InputSequence
0 - 2
3
OutputSequenceCounter
OutputSyncBit
4 - 6
7
InputSequenceAck
InputSyncAck
0 - 2
3
InputSequenceCounter
InputSyncBit
4 - 6
7
OutputSequenceAck
OutputSyncAck
Output sequence
Communication status of the CPU
Input sequence
Communication status of the module
Intersecting
Handshakes
Figure 45: Relationship between OutputSequence and InputSequence
Registers
"OutputSequence"
and
"InputSequence"
are logically composed of 2 half-bytes. The low part signals
to the opposite station whether a channel should be opened or if data should be accepted. The high part is to
acknowledge that the requested action was carried out.
SyncBit and SyncAck
If SyncBit and SyncAck are set in one communication direction, then the channel is considered "synchronized", i.e.
it is possible to send messages in this direction. The status bit of the opposite station must be checked cyclically.
If SyncAck has been reset, then SyncBit on that station must be adjusted. Before new data can be transferred,
the channel must be resynchronized.
SequenceCounter and SequenceAck
The communication partners cyclically check whether the low nibble on the opposite station changes. When one
of the communication partners finishes writing a new sequence to the MTU, it increments its SequenceCounter.
The current sequence is then transmitted to the receiver, which acknowledges its receipt with SequenceAck. In
this way, a "handshake" is initiated.
Information:
If communication is interrupted, segments from the unfinished message are discarded. All messages
that were transferred completely are processed.







































































