
















61
3.10.2
Transfer arm data
When WINCAPSIII exchanges project data with the robot controller, arm data unique
to individual robots can be transferred only from the robot controller to WINCAPSIII,
but it cannot from WINCAPSIII to the robot controller. This is to protect arm data in the
robot controller from being overwritten accidentally.
To transfer arm data from WINCAPSIII to the robot controller, use the following
procedure.
Step 1
Loading the arm data (***.wam) into the WINCAPSIII project
This step is necessary when only arm data is supplied by DENSO. When project
data has been backed up, open the project data in WINCAPSIII and proceed to
STEP 2.
Start WINCAPSIII, log on as a Programmer, and create a project suitable for your
robot model.
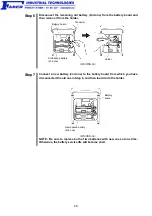
Choose Tool | Arm parameters to display the Arm Parameter window.
Press Load and select the arm data (***.wam) to load.
Step 2
Configuring communication options for transfer of arm data from WINCAPSIII to the
robot controller
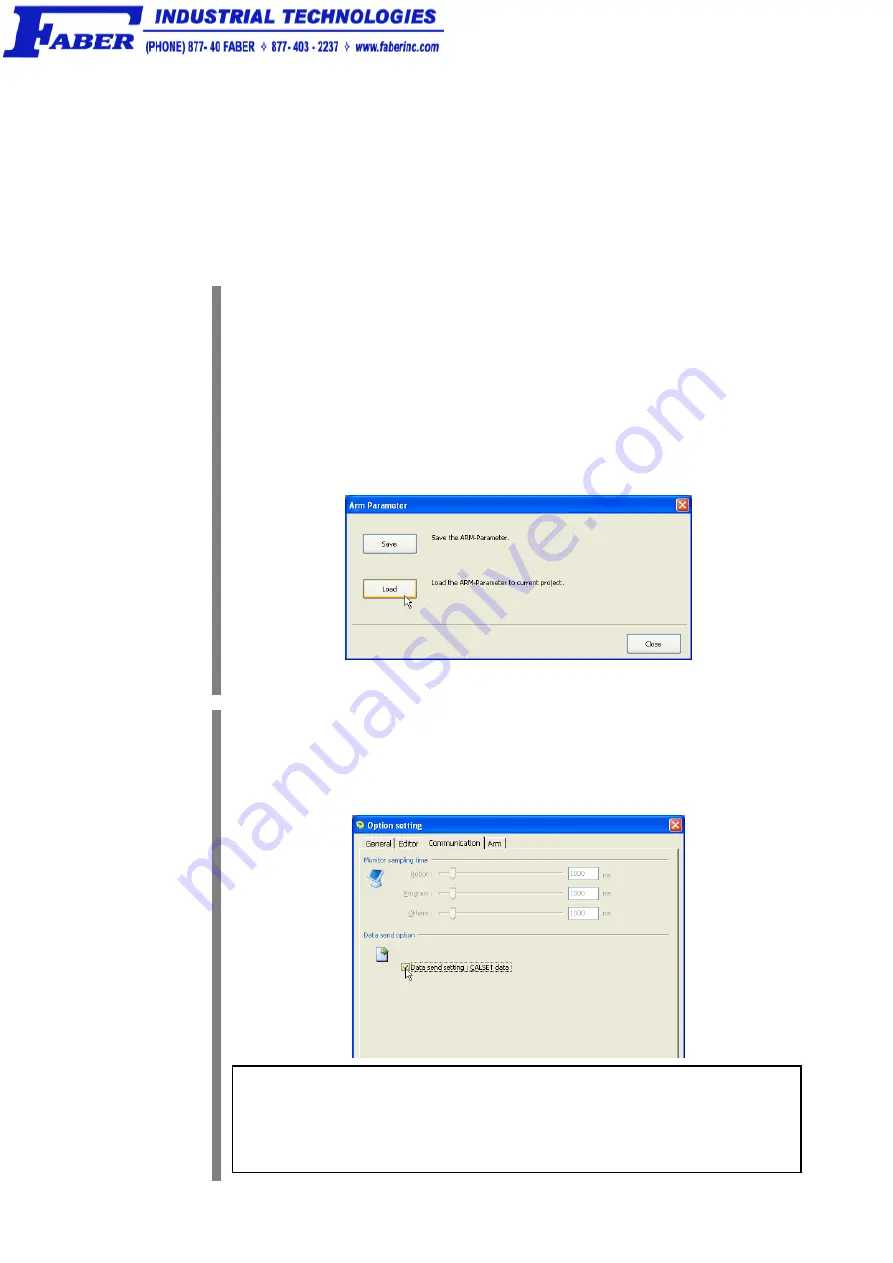
Choose Tool | Option | Communication tab. Select "Data send setting: CALSET
data" and press OK.
ATTENTION: During ordinary operations, the "Data send setting: CALSET
data" should be deselected. If it is selected, creating a new
project and transferring arm parameters overwrites the
CALSET-related data in the robot controller with the transferred
data, causing errors in teaching positions.







































































