





























Page 81 of 130
DOC No.
:
T202001006
The joint interpolation is used when the manipulator does not need to move in a specific
path toward the next step position. When the joint interpolation is used for teaching a robot axis,
the move instruction is MOVJ. For safety purposes, use the joint interpolation to teach the first
step.
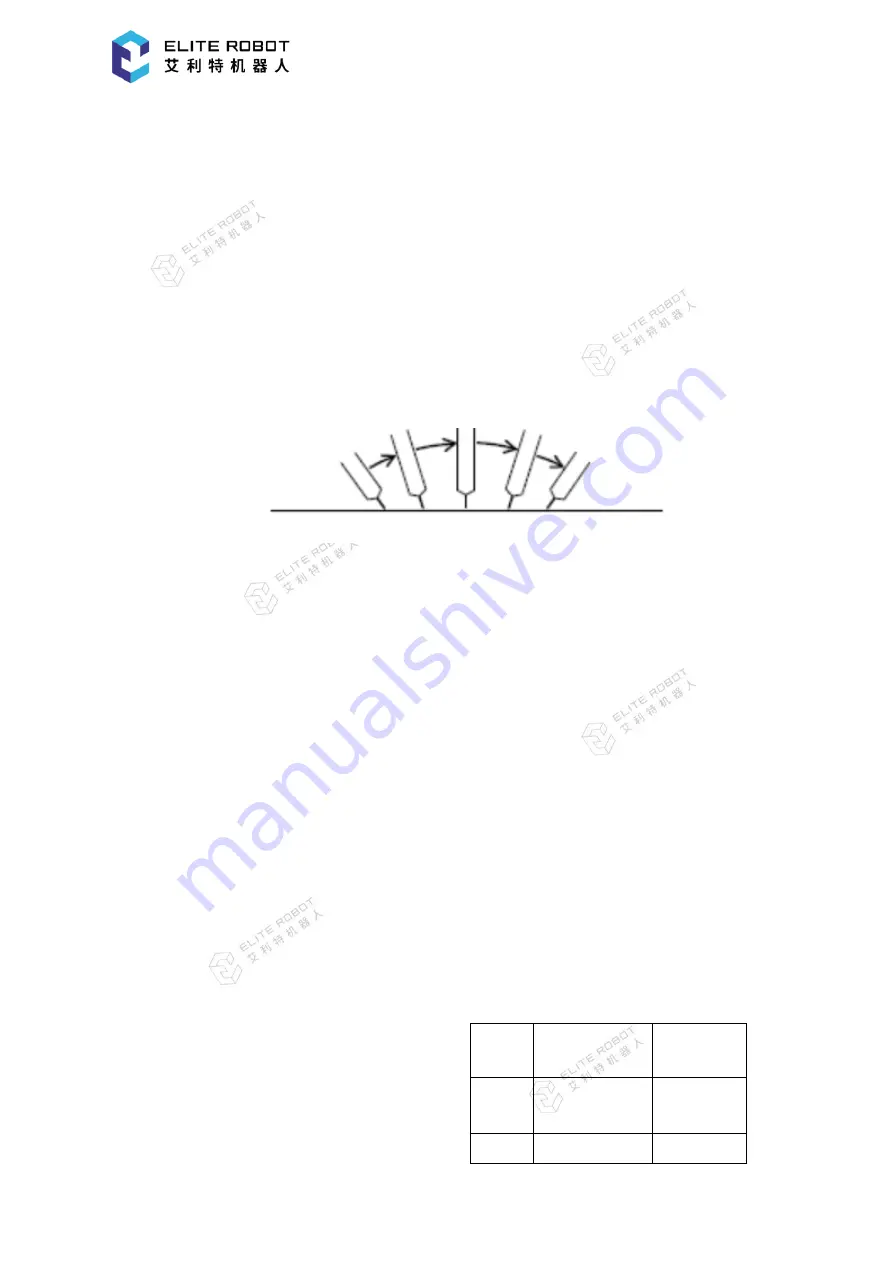
Linear Interpolation
The manipulator moves in a linear path from one taught step to the next. When the linear
interpolation is used to teach a robot axis, the move instruction is MOVL. Linear interpolation is
used for work such as welding. The manipulator moves automatically changing the wrist position
as shown in the figure below.
Circular Interpolation
The manipulator moves in an arc that passes through three points. When circular
interpolation is used for teaching a robot axis, the move instruction is MOVC.
When a single circular movement is required, teach the circular interpolation for three points,
P1 to P3, as shown in the following figure. If joint or linear interpolation is taught at P0, the point
before starting the circular operation, the manipulator moves from P0 to P1 in a straight line.
Point
Interpolation
Type
Instruction
P0
Joint or Linear MOVJ
MOVL
P1-P3
Circular
MOVC






































































