





























Chapter 5 Function parameter
69
Ch
ap
ter 5
50
Clear current running
time
If the terminal is valid, the inverter's current running time is
cleared, the function needs to work with Timing run (F7.42) and
current running time arrival(F7.45).
51 Jog order3(set F7.54) Jog running order
,
direction set through F7.54
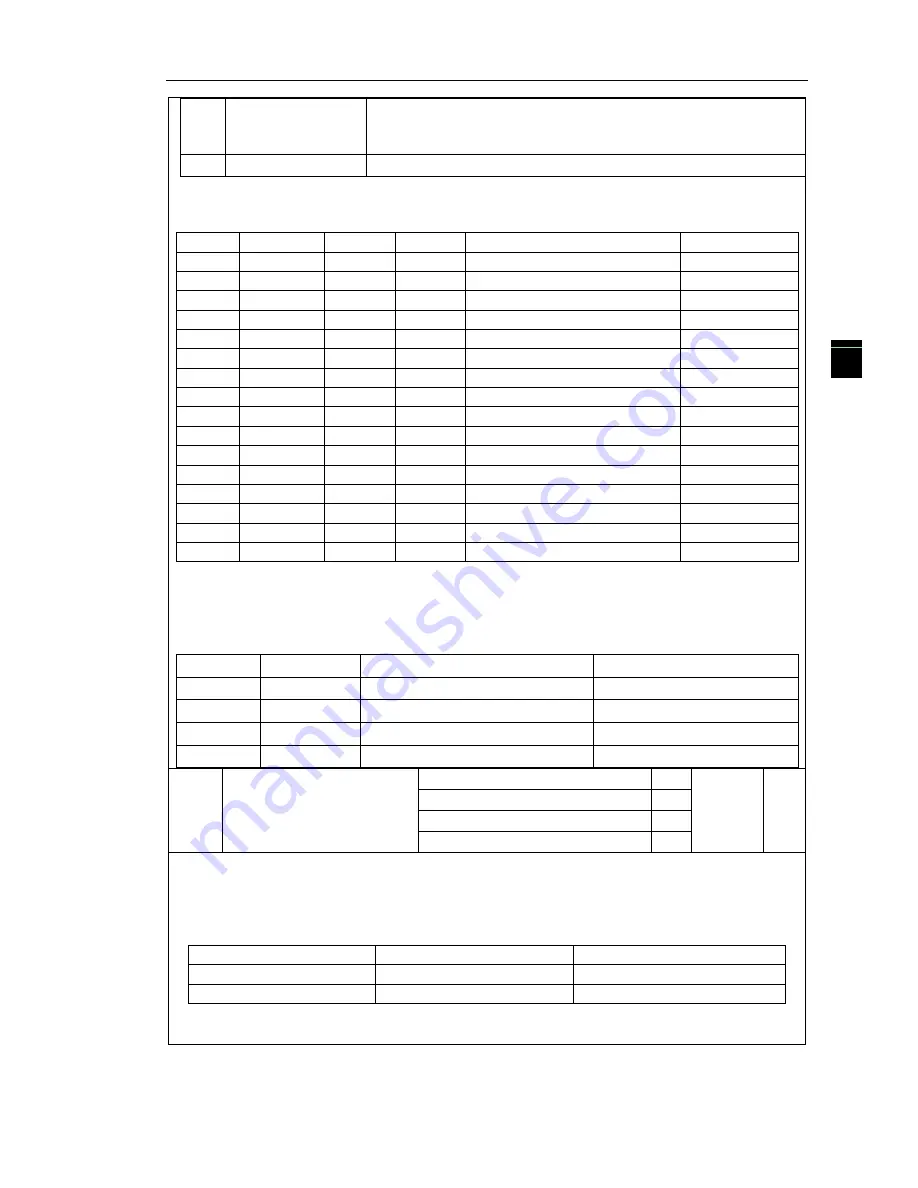
Table 1 Multi command functions description
Over 4 segments command terminal, can be combined into 16 states, each state corresponds
to the 16 instruction set value. As shown in Table 1 below:
K4
K3
K2
K1
Command setting
Parameters
OFF
OFF
OFF
OFF
0-stage speed setting 0X
E1.00
OFF
OFF
OFF
ON
1-stage speed setting 1X
E1.01
OFF
OFF
ON
OFF
2-stage speed setting 2X
E1.02
OFF
OFF
ON
ON
3-stage speed setting 3X
E1.03
OFF
ON
OFF
OFF
4-stage speed setting 4X
E1.04
OFF
ON
OFF
ON
5-stage speed setting 5X
E1.05
OFF
ON
ON
OFF
6-stage speed setting 6X
E1.06
OFF
ON
ON
ON
7-stage speed setting 7X
E1.07
ON
OFF
OFF
OFF
8-stage speed setting 8X
E1.08
ON
OFF
OFF
ON
9-stage speed setting 9X
E1.09
ON
OFF
ON
OFF
10-stage speed setting 10X
E1.10
ON
OFF
ON
ON
11-stage speed setting 11X
E1.11
ON
ON
OFF
OFF
12-stage speed setting 12X
E1.12
ON
ON
OFF
ON
13-stage speed setting 13X
E1.13
ON
ON
ON
OFF
14-stage speed setting 14X
E1.14
ON
ON
ON
ON
15-stage speed setting 15X
E1.15
When multi-speed is selected as frequency source, the 100.0% of function code E1.00 to
E1.15 corresponds to maximum frequency F0.19. Multi-stage command is used for the function of
multi-speed, also for PID reference source to meet the need to switch between different reference
values.
Table 2 - function description of ac/deceleration time selection terminal.
Terminal 2
Terminal 1
Ac/deceleration time selection
Parameters
OFF
OFF
Acceleration time 1
F0.13
、
F0.14
OFF
ON
Acceleration time 2
F7.08
、
F7.09
ON
OFF
Acceleration time 3
F7.10
、
F7.11
ON
ON
Acceleration time 4
F7.12
、
F7.13
F1.10
Terminal command mode
Two-wire type 1
0
0
★
Two-wire type 2
1
Three-wire type 1
2
Three-wire type 2
3
This parameter defines four different modes to control inverter operation through external
terminals.0: Two-wire type 1
This mode is the most commonly used two-wire mode. The forward/reverse operation of
motor is determined by terminal DIx, DIy.
The terminal function is set as follows:
Terminals
Set value
Description
DIx
1
Forward run (FWD)
DIy
2
Reverse run (REV)
Of which, DIx and DIy are the multi-function input terminals of DI1 to DI10, the level is
active.







































































