





























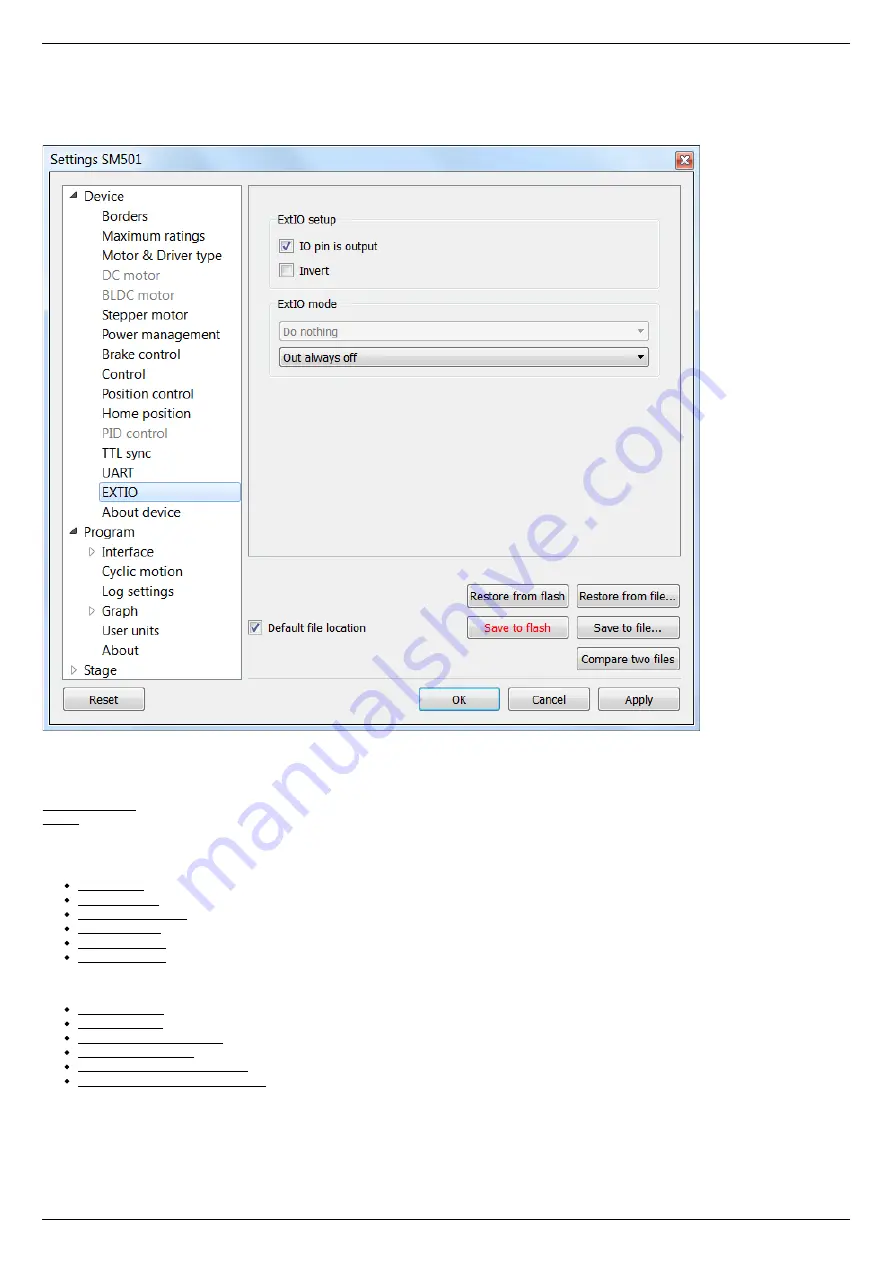
5.3.11. General purpose input-output settings
Device configuration -> EXTIO settings
General purpose input-output settings tab
For detailed information, please see
General purpose digital input-output
.
ExtIO setup
IO pin is output - if the flag is checked the needle of ExtIO works in output mode, otherwise - in the input mode.
Invert - if the flag is checked the rising edge is ignored and the falling edge is active.
ExtIO mode - mode selection
If ExtIO configured for input mode the choice of controller action settings by the input pulse is active:
Do nothing - do nothing.
Stop on input - run STOP command.
Power off on input - run PWOF.
Movr on input - run MOVR.
Home on input - run HOME.
Alarm on input - enter ALARM state.
If ExtIO configured for output mode the choice of the output state depending on the controller status is active:
Out always off - always in inactive state.
Out always on - always in active state.
Out active when moving - in active state during motion.
Out active in Alarm - in active state if the controller is in the Alarm state.
Out active when motor is on - in active state if the motor windings are powered.
Out active when motor is found - in active state if the motor is connected.
Page 144 / 345
Page 144 / 345
Summary of Contents for 8SMC5-USB
Page 30: ...Linux Page 30 345 Page 30 345 ...
Page 83: ...Connection of magnetic brake to one axis or two axis systems Page 83 345 Page 83 345 ...
Page 87: ...Scheme of buttons connection to the HDB 26 connector Page 87 345 Page 87 345 ...
Page 99: ...Page 99 345 Page 99 345 ...
Page 167: ...Vertical load capacity the maximum vertical load on the stage Page 167 345 Page 167 345 ...
Page 186: ...Click Next Click Continue anyway Page 186 345 Page 186 345 ...
Page 188: ...Page 188 345 Page 188 345 ...
Page 190: ...Page 190 345 Page 190 345 ...
Page 193: ...Page 193 345 Page 193 345 ...
Page 201: ...Select the XILab application in the Programs block Start it Page 201 345 Page 201 345 ...
Page 274: ...7 Files 1 Configuration files 2 Software Page 274 345 Page 274 345 ...
Page 331: ...Motorized Iris Diaphragms 8MID98 Motorized Iris Diaphragm Page 331 345 Page 331 345 ...
Page 338: ...8 Related products 1 Ethernet adapter Page 338 345 Page 338 345 ...
Page 339: ...8 1 Control via Ethernet 1 Overview 2 Administration Page 339 345 Page 339 345 ...







































































