























Operation
Operating Manual PMCprimo MC
1003813-EN-03
| 60
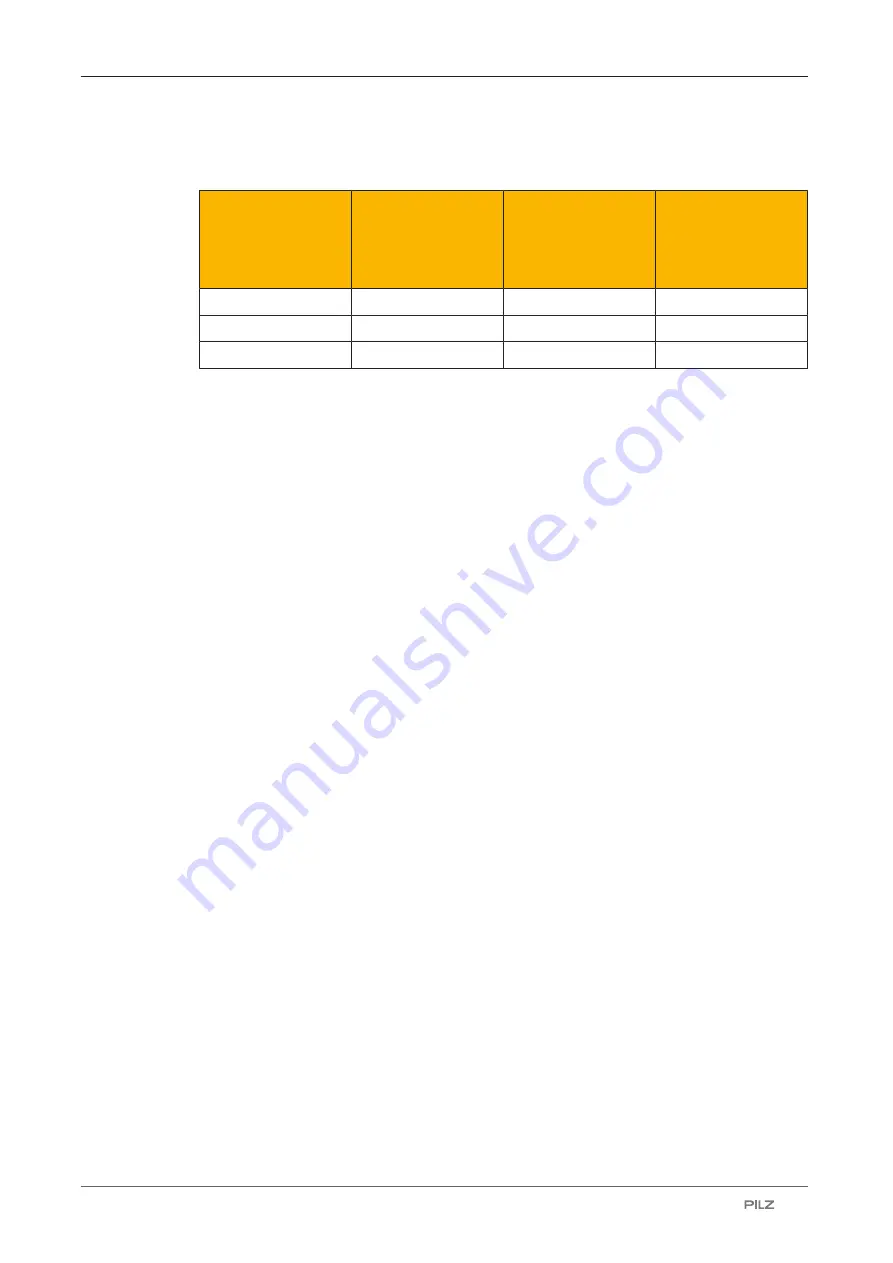
The following table provides an overview of the impact of a reset, start or stop on a vari-
able.
Action
Variable with attrib-
ute RETAIN
Variable with attrib-
ute PERSISTENT
Variable with attrib-
ute
RETAIN PERSIST-
ENT
Warm reset
x
-
x
Cold reset
-
-
-
Original reset
-
-
-
x = Value is retained, - = Value is re-initialised
8.2.2
Cold start, "Startup"
A reset via the "Power Off" operating status performs a system cold start with "Startup".
}
Switch the 24 VDC supply voltage to the motion controller off and then on again.
}
The motion controller changes to "Startup" operating status.
8.2.3
Reset commands
8.2.3.1
Warm reset
This command
}
Stops the user program.
}
Resets all variables to the value with which they were initialised (exception: variable with
attribute RETAIN).
}
Resets all variables that have not been explicitly initialised to a default initialisation value.
Commands:
}
Command language: RS4
}
IEC 61131 programming: Menu
Online -> Reset
8.2.3.2
Cold reset
This command
}
Stops the user program.
}
Resets all variables to the value with which they were initialised.
Commands:
}
Command language: RS5
}
IEC 61131 programming: Menu
Online -> Reset (cold)







































































