





























生活美好,臂不可少
http://www.realman-robotics.com
52
Blend radius:
The trajectory planning smooth transition distances. When the blend
radius is 0, the robot accurately moves to this point, slowing down and stopping.
Point setting:
This sets the motion position of the waypoint. Positional parameters can
be taught or manually modified (acting on real robotic arms).
Point editing:
This sets the motion position of the waypoint. Positional parameters can
be taught or manually modified (acting on simulated robotic arms).
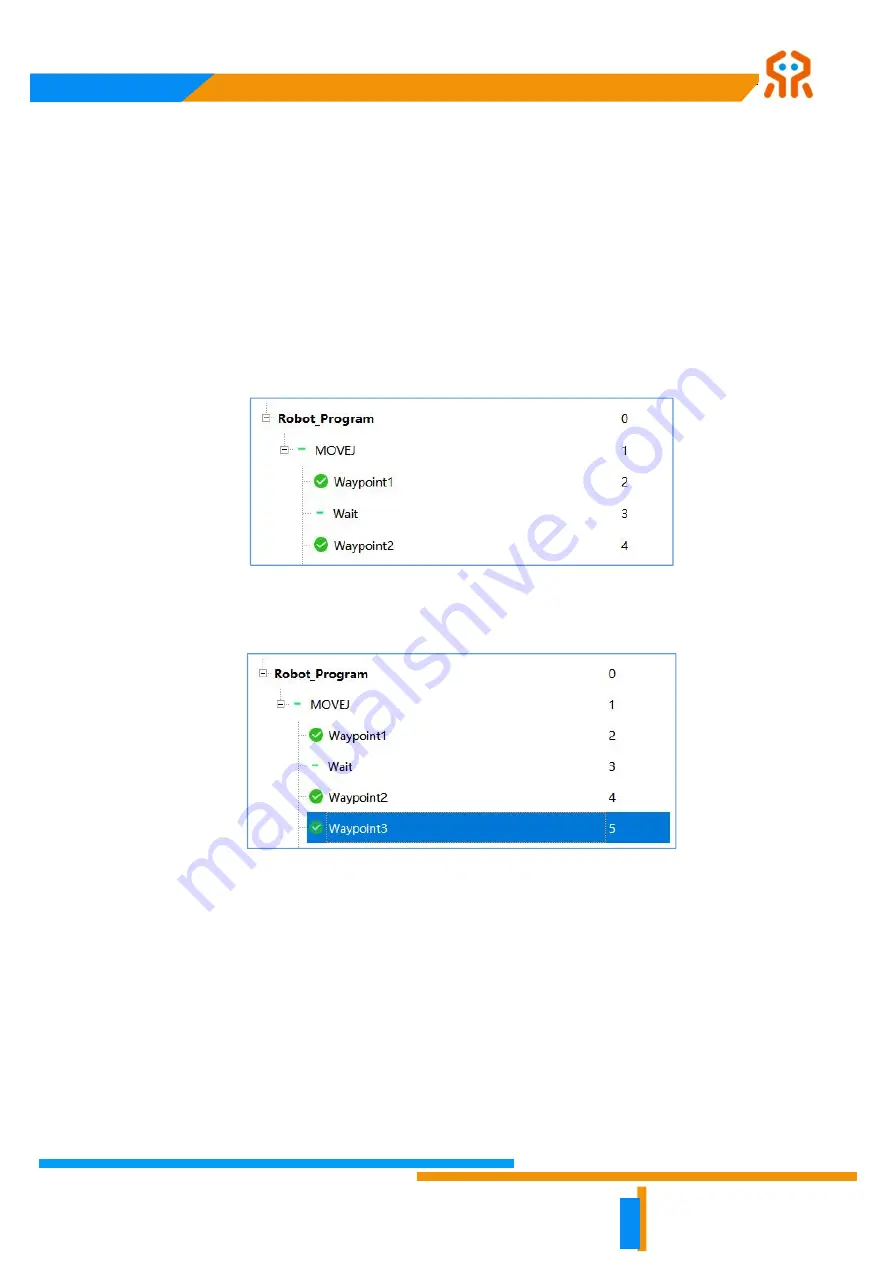
Demo:
Add a waypoint in the MOVEJ command in the program, and set the waypoint
to Waypoint3 under Waypoint2 as shown in the following figure.
Fig. 8-43 Waypoint demo.
Click the waypoint to set the point shown in the following figure:
Fig. 8-44 Waypoint demo.
<Wait>
The Wait command is used to wait for time or signal input. The options for Wait
command include no waiting, waiting time, waiting for digital input, and waiting for
analog input.







































































