





























生活美好,臂不可少
http://www.realman-robotics.com
48
Fig. 8-34 Cursor position example.
8.3.6 Basic Commands
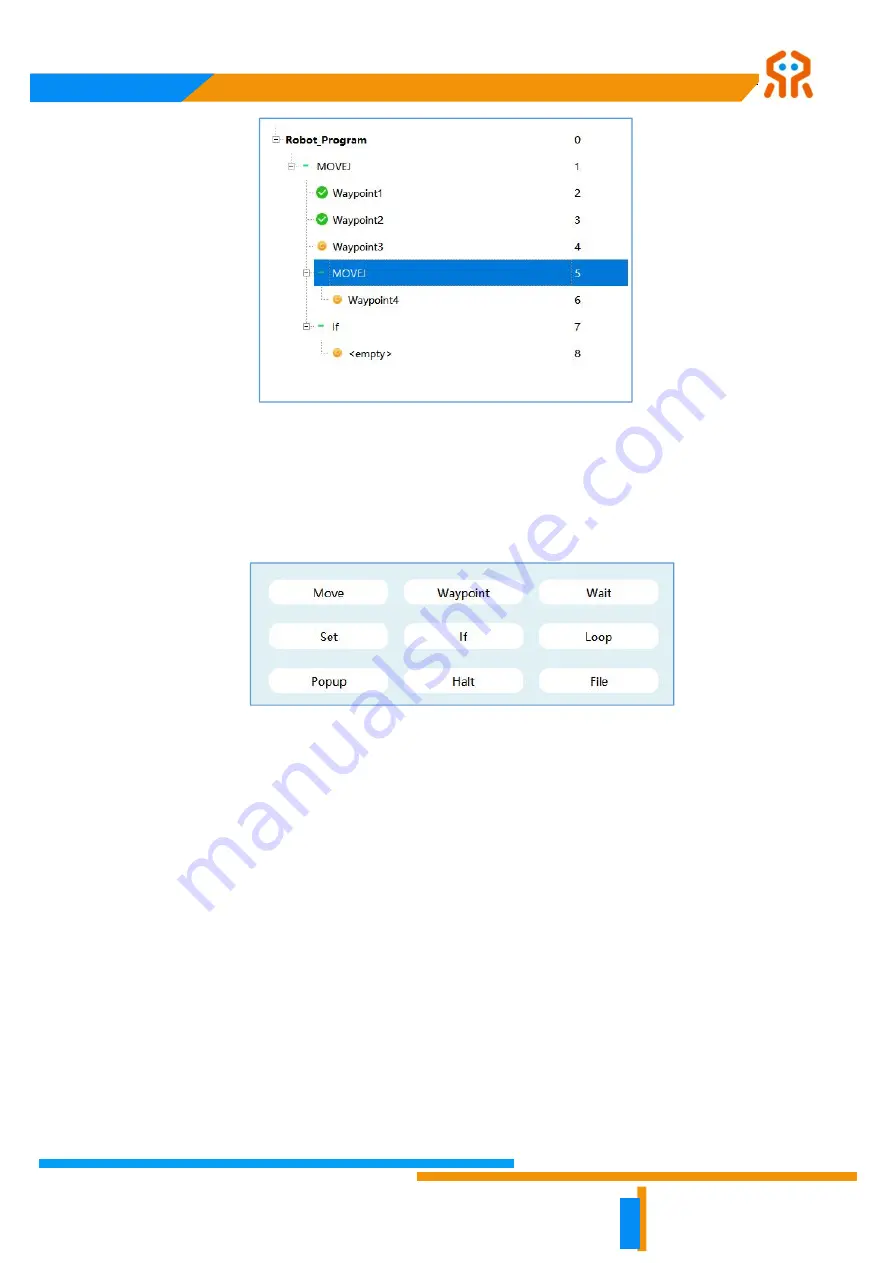
The basic commands include "Move", "Waypoint", "Wait", "Set", "If", "Loop",
Pop-up, "Halt", and "File".
Fig. 8-35 Basic commands.
<Move>
The move command includes four types of movements: "MOVEJ", "MOVEL",
"MOVEJ_P", and "MOVEC".
MOVEJ and MOVEJ_P: This only guarantees to reach the final position, but no
intermediate trajectory is constrained.
MOVEL: While ensuring reaching the final position, the trajectory between the two
points is linear.
MOVEC: Used to execute an arc or circular trajectory, only two waypoints
(intermediate point and end point) can be added.







































































