




























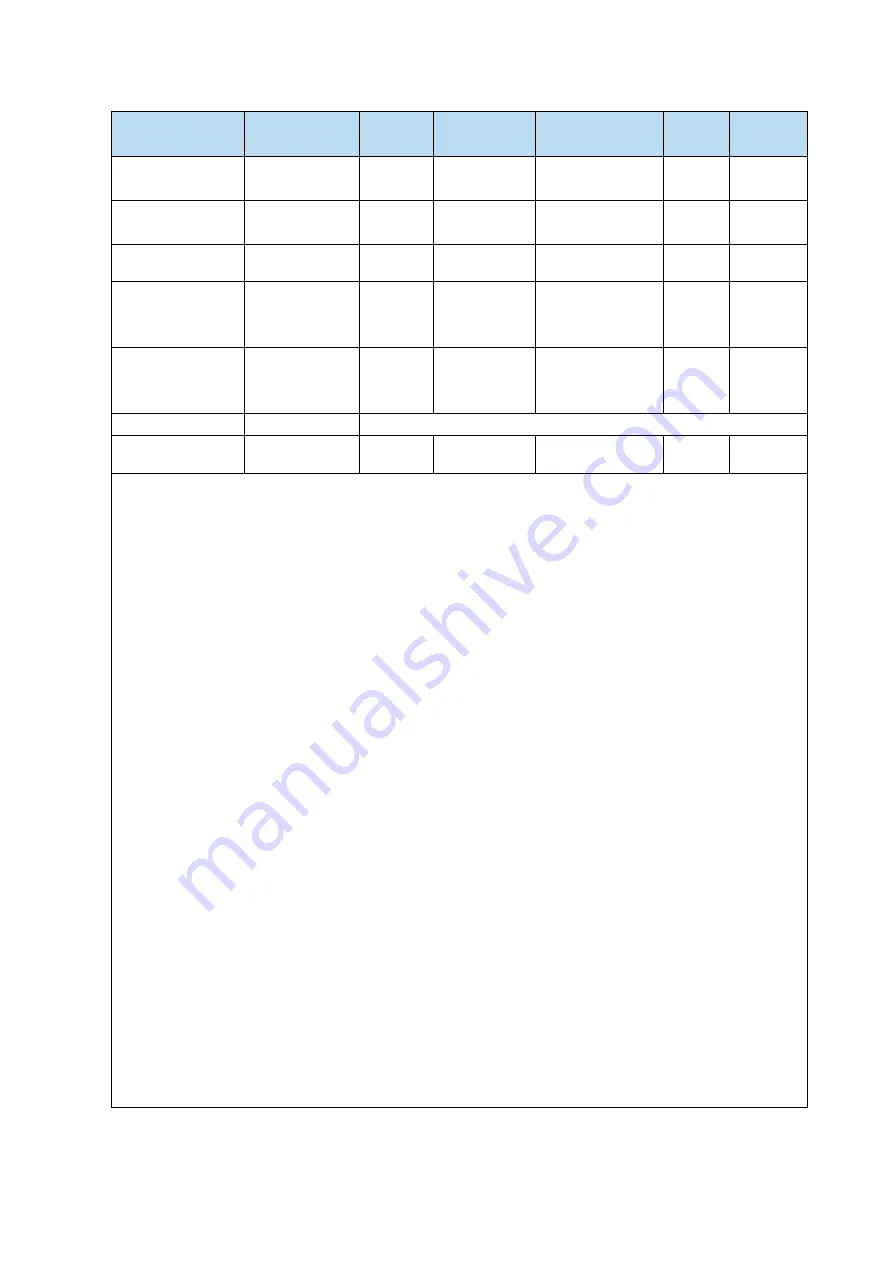
5.3.3.3 Position segment 1 to 35 parameter settings
Parameter
Meaning
Default
setting
Unit
Range
Change
Effective
P4-10+
(
n-1
)
*7
Pulse number
(low bit)
0
1 pulse
-9999
~
9999
Servo
bb
At once
P4-11+
(
n-1
)
*7
Pulse number
(high bit)
0
10000 pulses
-32767
~
32767
Servo
bb
At once
P4-12+
(
n-1
)
*7
Speed
0
0.1rpm
0
~
65535
Servo
bb
At once
P4-13+
(
n-1
)
*7
Trapezoid
acceleration
time
0
ms
0
~
65535
Servo
bb
At once
P4-14+
(
n-1
)
*7
Trapezoid
deceleration
time
0
ms
0
~
65535
Servo
bb
At once
P4-15+
(
n-1
)
*7
Reserved
-
P4-16+
(
n-1
)
*7
Adjust time
0
ms
0
~
65535
Servo
bb
At once
Notes:
1. Set pulse number = pulse number (high bit) ×10000 + pulse number (low bit).
2. In formula P4-10+(n-1)*7, n is the segment no. of internal position; the range is 1~35. Segment 1~12 can
be set through the operate panel, segment 13~35 needs to write in parameters through communication
(RS232 or RS485).
3. In the relative positioning mode, if the pulse high position is set to 9999, the pulse low position is set to
9999, or the pulse high position is set to - 9999, and the pulse low position is set to - 9999, and p4-03.3 = 1
(do not wait for the positioning to be completed), the infinite pulse mode will be entered. On the contrary,
the number of pulses is limited.
4. If one of the segment speed is zero, servo will skip this segment and run the next segment.
5. In relative positioning mode, if one segment speed is not zero but the pulse number is zero, the motor
will not run, but the wait mode is effective. The servo will run the next segment when the adjust time is out.
6. In absolute positioning mode, if one segment speed is not zero but the pulse number is zero, the
motor will return to the reference origin with the speed of this segment.
7. In absolute positioning mode, if two consecutive segments speed are not zero, but the pulse number is
the same, the servo motor will not run but the wait mode is effective.
8. In the absolute positioning mode, the number of rotations of the motor is limited and cannot be
unlimited.
9. At present, there are only two kinds of velocity in the internal position mode: step speed and slope speed.
When the trapezoidal acceleration time and trapezoidal deceleration time are set to 0, it is in the form of
step speed. When the trapezoidal acceleration time and trapezoidal deceleration time are greater than 0, it is
in the form of slope speed.
10. Trapezoidal acceleration time and trapezoidal deceleration time refer to the time required to change
from 0 to rated speed.
11. If the speed of a certain parameter set is 0, the position command of this section will be ignored in the
step change mode of 0 / 1 / 2. However, in the mode of 4 / 5 / 6, the motor does not rotate when the step
change is triggered at this section.
12. In the internal position section parameters, the position commands of pulse settings are still affected by
the electronic gear ratio. The actual number of turns of the motor should be determined by combining the
set pulse command and the electronic gear ratio.
13. In the absolute positioning mode, the starting position of each step change is based on the starting
position of the first triggering step change. In the relative positioning mode, the starting position of each
step change is based on the position at the end of the last step change.
14. In the relative positioning mode, the infinite pulse position segment can be set in the 35 segment
positions. The motor will run continuously in this segment, unless the trigger skips the current segment.
Summary of Contents for DS5L1 Series
Page 1: ...DS5L1 series servo driver User manual WUXI XINJE ELECTRIC CO LTD Data No SC5 05 20200929 1 0 ...
Page 2: ......
Page 6: ......
Page 100: ...3 Set the auto tuning interface 4 Click ok to start inertia identification ...
Page 106: ...3 set the auto tuning interface ...
Page 112: ...with higher rigidity 6 Start auto tune 7 Open the servo enable then click ok ...
Page 169: ...Appendix 9 Torque speed characteristic curve ...
Page 170: ......







































































