




























ZMC408SCAN Motion Controller Hardware Manual V1.5
BASE(0,1)
'select axis 0 and axis 1
ATYPE = 1,1
'set axis 0 and axis 1 as pulse axes
UNITS = 1000,1000
'set pulse amount as 1000 pulses
SPEED = 10,10
'set axis speed as 10*1000 pulse/s
ACCEL = 1000,1000
‘set axis acceleration as 1000*1000 pulse/s/s
FWD_IN = -1,-1
'prohibit using axis positive hardware position limit
REV_IN = -1,-1
'prohibit using axis negative hardware position limit
MOVE(10) AXIS(0)
'axis 0 moves distance of 10*1000 pulses in positive
MOVE(-20) AXIS(0)
'axis 0 moves distance of 20*1000 pulses in negative
3.10.
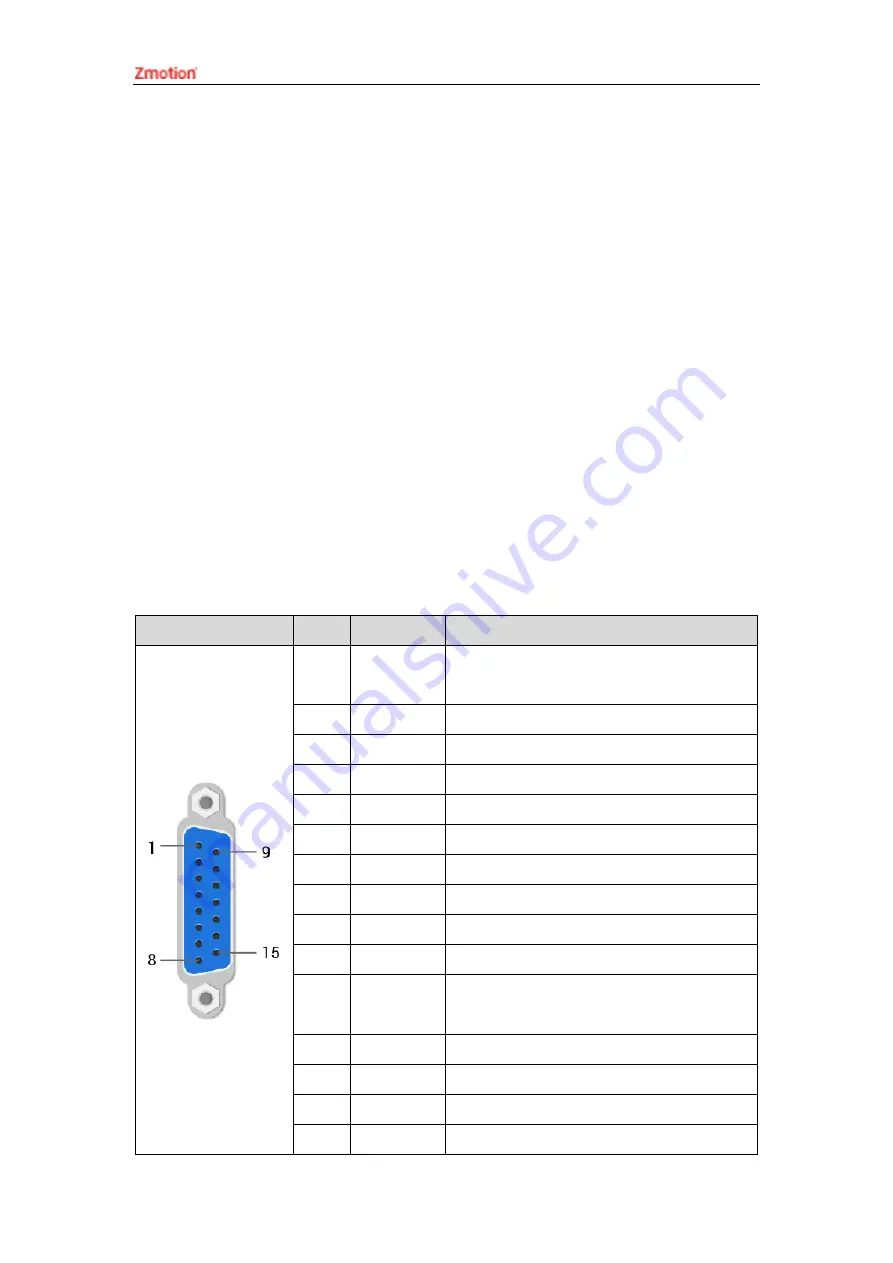
MPG Handwheel Interface
This product provides a special interface for the local handwheel encoder axis, which is a
double-row standard DB15 female seat.
→
Interface Definition
Interface
PIN
Signal
Description
1
H-5V
Positive pole of 5V power supply for output,
which supplied power for handwheel
2
HA-
Encoder phase A signal (IN32)
3
HB-
Encoder phase B signal (IN33)
4
HEMGN
Emergency stop signal (IN43)
5
NC
Reserved
6
HX1
Select ration X1 (IN34)
7
HX10
Select ration X10 (IN35)
8
HX100
Select ration X100 (IN36)
9
HSU
Axis selection 3 (IN40)
10
HSV
Axis selection 4 (IN41)
11
EGND
Negative pole of 5V power supply for
output, signal public end
12
HSW
Axis selection 5 (IN42)
13
HSZ
Axis selection 2 (IN39)
14
HSY
Axis selection 1 (IN38)
15
HSX
Axis selection 0 (IN37)







































































