





























4.7 Operation Sequence
4-65
4
* If communication disconnects normally, the NOP command is sent. If communication does not
disconnect normally, the DISCONNECT command is sent for two or more communications
cycles prior to connection, then the CONNECT command is sent.
4.7.3
Operation Sequence When Being Servo ON
Motor control using a host controller is performed using motion commands only while the
SERVOPACK is Servo ON (while current flows to the motor). While the SERVOPACK is
Servo OFF (while current to the motor is interrupted), control is performed by the
SERVOPACK so that the reference coordinate system (POS, MPOS) and FB coordinate sys-
tem (APOS) are equal. In order to send appropriate motion commands, it is necessary to use
the SMON command after the SERVOPACK changes to Servo ON to read the Servo refer-
ence coordinate (POS) and send an appropriate reference position.
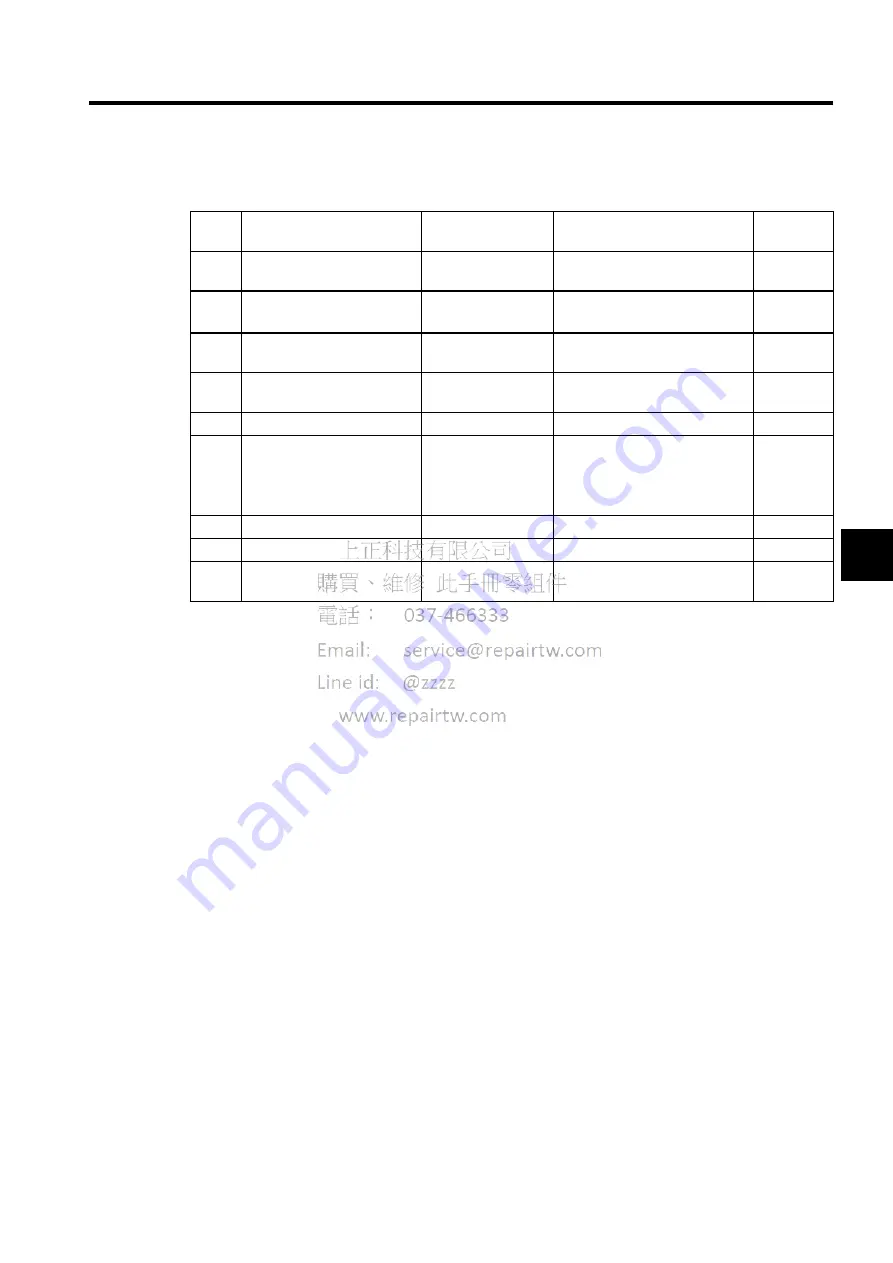
Table 4.6 Step 2: Ordinary Operation Sequence
Proce-
dure
Item
Command
Description
Phase
1
Turn ON control and main cir-
cuit power supplies.
NOP/DISONNECT*
Turn ON power supplies.
1
2
Establish connection.
CONNECT
Establish communications.
Start the WDT count.
2 or 3
3
Check information such as
device ID.
ID_RD
Read information such as device
type.
2 or 3
4
Turn ON encoder.
SENS_ON
Turn ON encoder and obtain the
position data.
2 or 3
5
Operate main circuit.
SV_ON
Change to Servo ON.
2 or 3
6
Start operation.
.
.
.
.
.
.
Start operation.
.
.
.
2 or 3
7
Turn OFF main circuit.
SV_OFF
Change to Servo OFF.
2 or 3
8
Disconnect connection.
DISCONNECT
Disconnect communications.
4 to 1
9
Turn OFF control and main
circuit power supplies.
−
Turn OFF power supplies.
5







































































