





























Three-wire Interface Operation
The 3
-
wire interface is an industry standard motor control interface. This function uses
two inputs for momentary contact start/stop control, and a third for selecting forward or
reverse direction. To implement the 3
-
wire interface, assign 20
[
STA
] (
Start
)
, 21
[
STP
]
(
Stop
)
, and 22
[
F/R
] (
Forward/Reverse
)
to three of the intelligent input terminals. Use a
momentary contact for Start and Stop. Use a selector switch, such as SPST for the
Forward/Reverse input. Be sure to set the operation command selection A002=01 for
input terminal control of motor.
If you have a motor control interface that needs logic
-
level control
(
rather than
momentary pulse control
)
, use the
[
FW
]
and
[
RV
]
inputs instead.
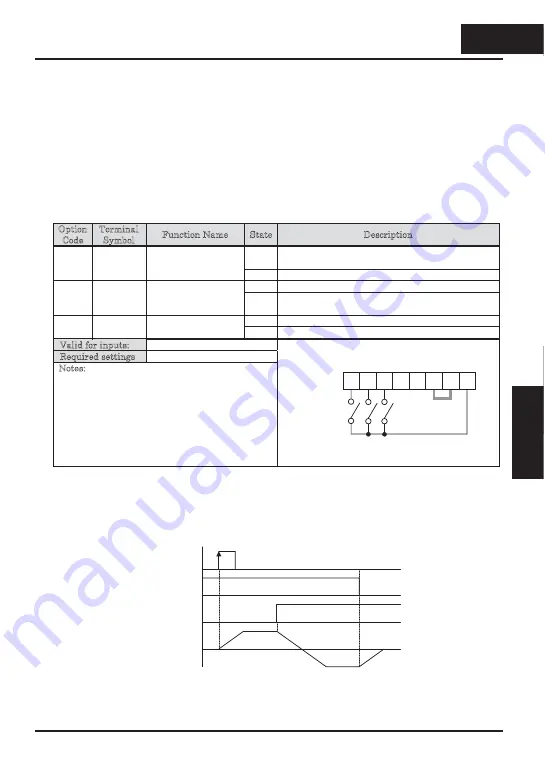
Option
Code
Terminal
Symbol
Function Name
State
Description
ON
Start motor rotation on momentary contact
(
uses
acceleration profile
)
20
STA
Start Motor
OFF
No change to motor operation
ON
No change to motor operation
21
STP
Stop Motor
OFF
Stop motor rotation on momentary contact
(
use
deceleration profile
)
ON
Select reverse direction of rotation
22
F/R
Forward/Reverse
OFF
Select forward direction of rotation
Valid for inputs
:
C001~C005
Required settings
A002 = 01
Notes
:
x
The STP logic is inverted. Normally the switch
will be closed, so you open the switch to stop. In
this way, a broken wire causes the motor to stop
automatically
(
safe design
)
.
x
When you configure the inverter for 3
-
wire
interface control, the dedicated
[
FW
]
terminal is
automatically disabled. The
[
RV
]
intelligent
terminal assignment is also disabled.
Example (default input configuration shown—see
page 3–49
):
See I/O specs on
page 4–6.
The diagram below shows the use of 3
-
wire control. STA
(
Start Motor
)
is an edge
-
sensitive
input
;
an OFF
-
to
-
ON transition gives the Start command. The control of direction is level
-
sensitive, and the direction may be changed at any time. STP
(
Stop Motor
)
is also a level
-
sensitive input.
5
4
3
2
1
L
PCS P24
F/R
STA
STP
[STP] terminal
1
0
t
[F/R] terminal
1
0
Motor revolution
speed
[STA] terminal
1
0
4
25
Operations and
Monitori
ng
4
−
25
Operations and
Monitoring







































































