


























Features II JS/JSR4400N SCARA Robot
JSG GANTRY Robot
JR2000N Desktop Robot
8
VARIABLE LIST
You can use the built-in variables (which are built into the robot as a function), and the user-defined
variables (which can be freely defined by the user).
User-defined variables other than local variables (variables effective only in defined point job data
which are defined by the
declare
command) are defined in the Customizing mode. (See the operation
manual
Features IV
for details of the Customizing mode.)
Boolean type (boo):
1-bit variable which holds only 1 (true) or 0 (false)
Numeric type (num):
8-byte real type (double type) variable
String type (str):
255-byte variable
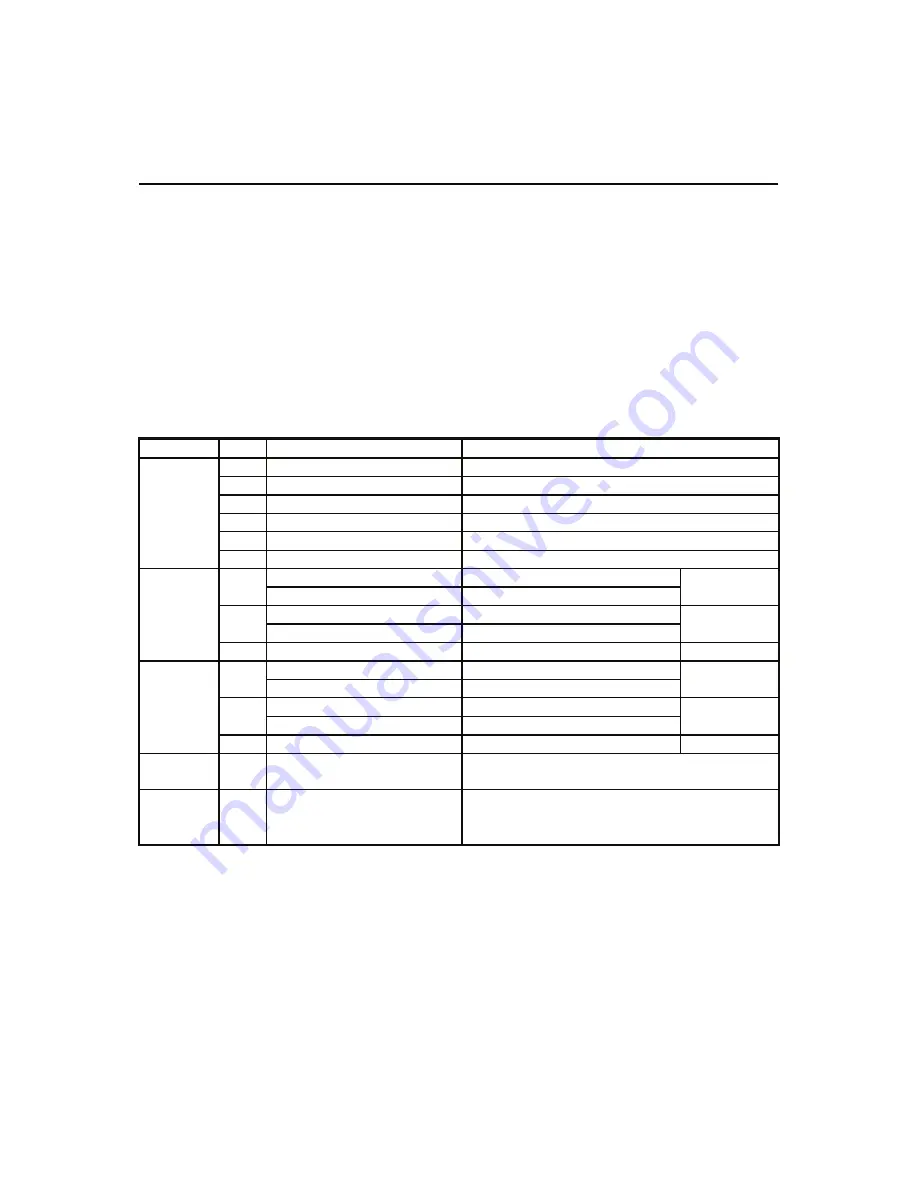
Category Type
Identifier
Description
boo
#mv (1 – 99)
Boolean variable
boo
#mkv (1 – 99)
Boolean variable (Keeping variable)*
num #nv (1 – 99)
Numerical variable
num #nkv (1 – 99)
Numerical variable (Keeping variable)*
str
#sv (1 – 99)
String variable
Free
Variable
str
#skv (1 – 99)
String variable (Keeping variable)*
#sysIn1 – 15
(JS and JSG Series)
boo
#sysIn1 – 16
(JR2000N and JR4400N Series)
I/O-SYS
#genIn1 – 18
(JS and JSG Series)
boo
#genIn1 – 8
(JR2000N and JR4400N Series)
I/O-1
Input
Variable
boo
#handIn1 – 4
(Available only for JS Series)
I/O-H
#sysOut1 – 14
(JS and JSG Series)
boo
#sysOut1 – 16
(JR2000N and JR4400N Series)
I/O-SYS
#genOut1 – 22
(JS and JSG Series)
boo
#genOut1 – 8
(JR2000N and JR4400N Series)
I/O-1
Output
Variable
boo #handOut1
–
4
(Available only for JS Series)
I/O-H
System
Flag
boo
#sysFlag(1) – #sysFlag(999) Refer to “SYSTEM FLAG LIST” on Page 14.
set #FBZ : Sound the buzzer.
reset #FBZ : Stop the buzzer.
Buzzer boo
#FBZ
(onoffBZ
: Turn the buzzer on and off.)
*: Variables which hold their values even if the robot is turned off are collectively referred to as
keeping variables
in the operation manuals.







































































