





















Features II JS/JSR4400N SCARA Robot
JSG GANTRY Robot
JR2000N Desktop Robot
3
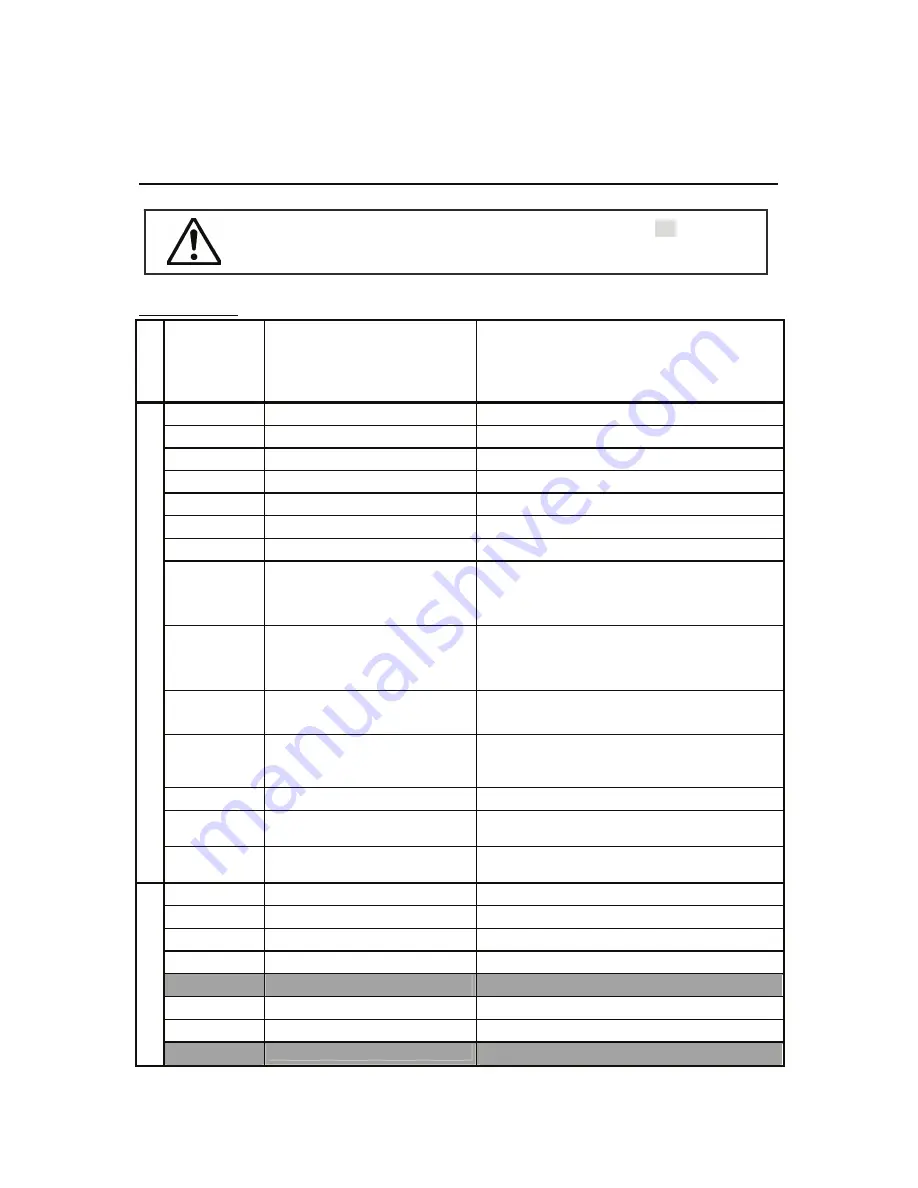
COMMAND LIST
Point Job Data
Categor
y
Command Necessary
Parameter
Description
set
Output Destination
Output ON.
reset
Output Destination
Output OFF.
pulse
Output Destination, Pulse Width Output ON pulses of predetermined length.
invPulse
Output Destination, Pulse Width Output OFF pulses of predetermined length.
delaySet
Output Destination, Delay Time Output ON after the predetermined delay time.
delayReset
Output Destination, Delay Time Output OFF after the predetermined delay time.
onoffBZ
ON Time, OFF Time
Sound the buzzer on and off.
onoffGLED
ON Time, OFF Time
Flash the green LED on the front of the
JR2000N Series robot (or on the operation box
for the JSR4400N robot).
onoffRLED
ON Time, OFF Time
Flash the red LED on the front of the JR2000N
Series robot (or on the operation box for the
JSR4400N robot).
dataOut
Output Data, Output Bit
Number, Output Destination
Output numeric data or a tag code assigned to
a point to the I/O.
dataOutBCD
Output Value, Output Bit
Number, Output Destination
Output numeric data or a tag code assigned to
a point to the I/O in BCD (binary-coded
decimal).
motorPowerON –
servoON Axis
Turn on the designated Axis servomotor.
(Available only for the JS and JSG Series)
ON/OFF Ou
tput C
on
tro
l
servoOFF Axis
Turn off the designated Axis servomotor.
(Available only for the JS and JSG Series)
if –
Conditional
branching
then
–
Perform if true.
else
–
Perform if false.
endIf
–
End of conditional branching
waitCondTime Wait Time
Wait for conditions for a designated period.
timeUp
–
Perform when time is up.
endWait
–
End of wait condition
if Br
an
ch
, W
ait Cond
ition
waitCond
–
Wait for conditions.
If you assign point job data that includes any of the highlighted ( ) commands
to a CP passing point, the commands will be ignored.


































































