





























Features II JS/JSR4400N SCARA Robot
JSG GANTRY Robot
JR2000N Desktop Robot
37
Accordingly,
•
The hand tool opens.
Å
Turn off #sysOut15 and on #sysOut16.
•
The hand tool closes.
Å
Turn on #sysOut15 and off #sysOut16.
The output commands to open and close the hand tool are as follows:
reset #sysOut15
set #sysOut16
Output #sysOut15 OFF.
Output #sysOut16 ON.
Æ
Open the hand tool.
set #sysOut15
reset #sysOut16
Output #sysOut15 ON.
Output #sysOut16 OFF.
Æ
Close the hand tool.
z
The
set
command continues to output an ON signal unless the command
reset
comes.
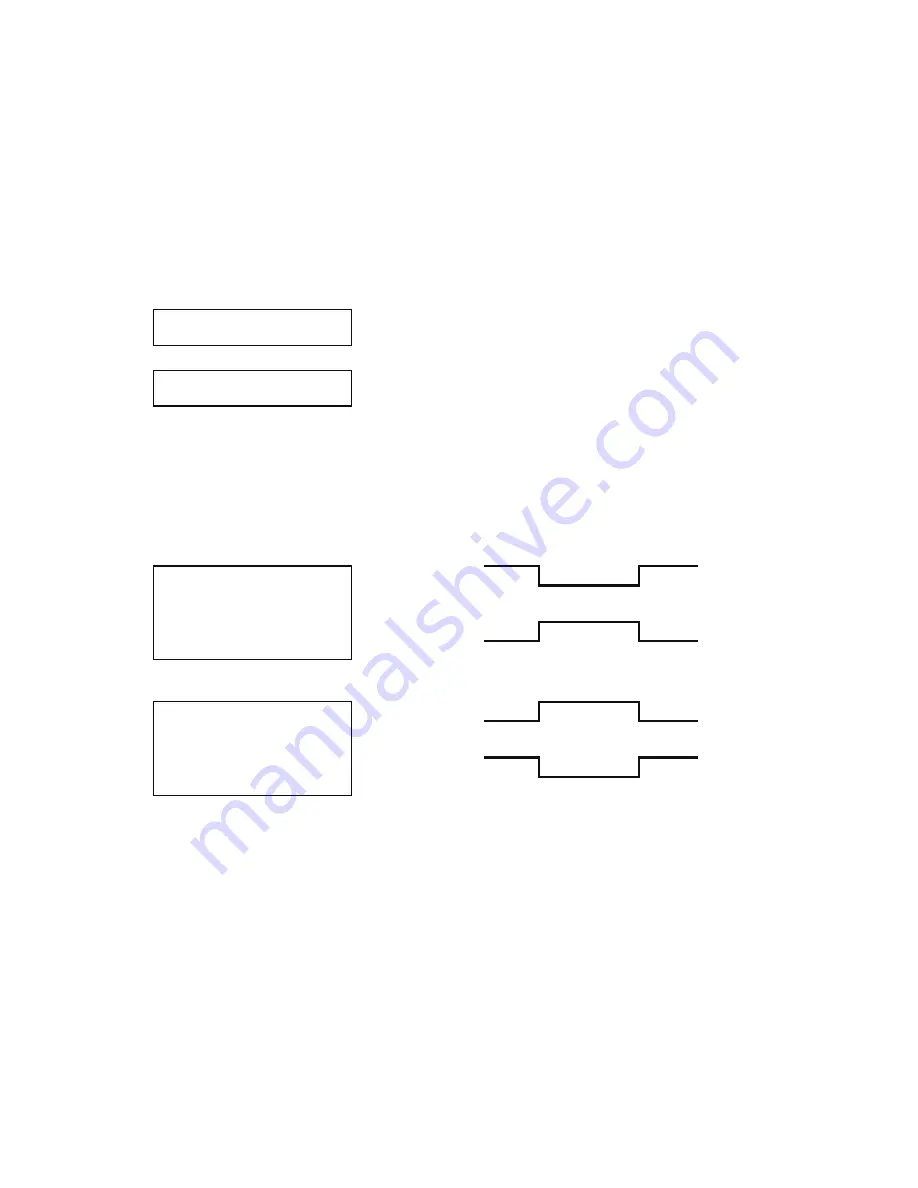
The pulse output commands to open and close the hand tool are as follows:
invPulse #sysOut15 100
#sysOut15
Å
0.1sec
Æ
ON
OFF
pulse #sysOut16 100
#sysOut16
Å
0.1sec
Æ
ON
OFF
Open the
hand tool.
pulse #sysOut15 100
#sysOut15
Å
0.1sec
Æ
ON
OFF
invPulse #sysOut16 100
#sysOut16
Å
0.1sec
Æ
ON
OFF
Close the
hand tool.







































































