





























Features II JS/JSR4400N SCARA Robot
JSG GANTRY Robot
JR2000N Desktop Robot
56
■
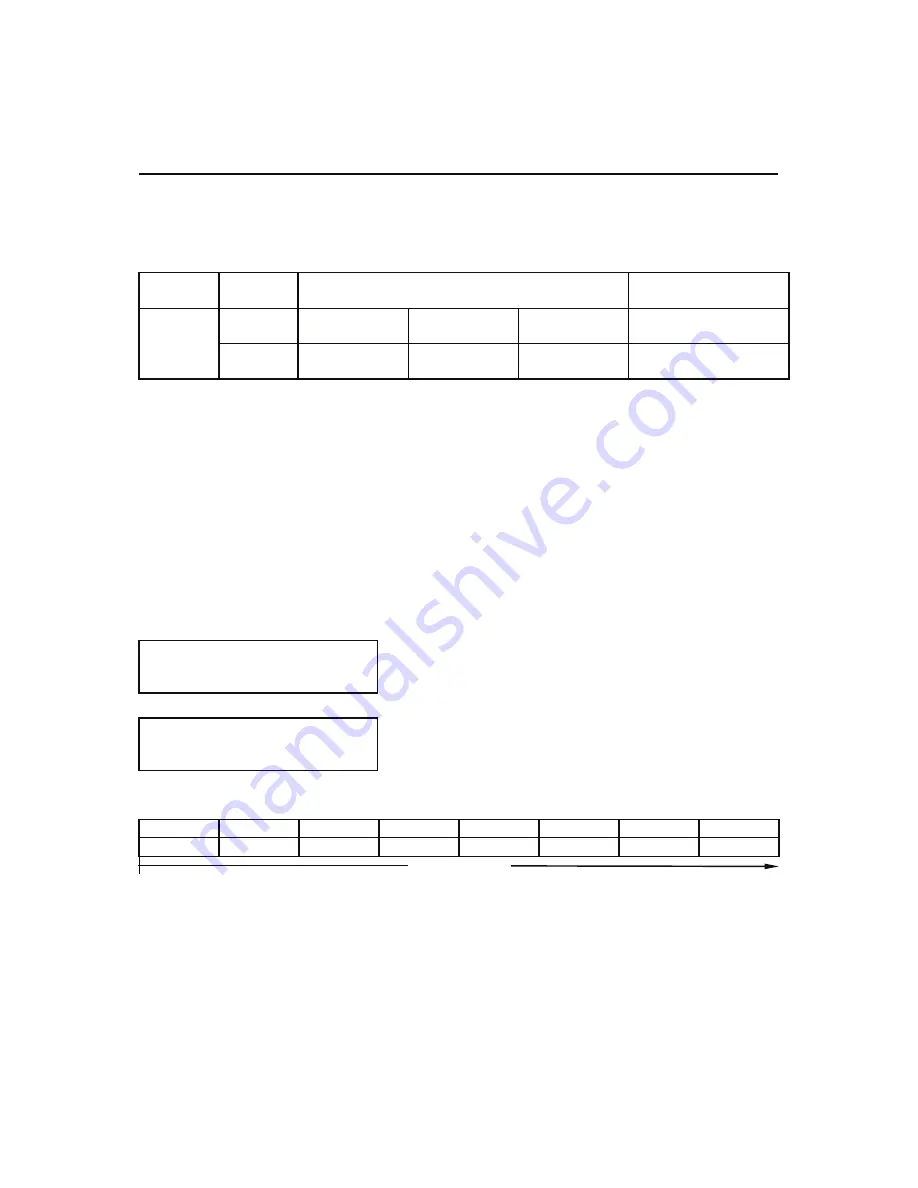
Input from I/O: dataIn, dataInBCD
Read out a numeric value from I/O or Boolean variables #mv (1 – 99) or #mkv (1 – 99) and assign it to
the specified variable.
Command
Category
Command
Parameter Job
dataIn
Numeric
Variable Name
Input Source
Input Bit No.
Read out numeric data
from I/O.
Delay,
Data In,
Wait Start dataInBCD
Numeric
Variable Name
Input Source
Input Bit No.
Read numeric data from
I/O in BCD.
z
BCD: Binary-Coded decimal
z
Read out width can be set using variables or expressions.
The
dataIn
and
dataInBCD
commands require the following three parameters: a variable to which a
loaded value is assigned, an input width (number of I/Os to be used for input), and an input width (the
smallest number between I/Os to be used for input: If #genIn3 – #genIn10 are used, the input source
is [3]).
z
The
dataIn
and
dataInBCD
commands require the
serial
I/O pins for input.
Example:
declare numeric code
dataIn code,#genIn3,8
Declare a local variable
code
.
Read out data #genIn3 – #genIn10 (I/O-1) as a numeric
value and assign it to
code
.
declare numeric code
dataInBCD code,#genIn3,8
Declare the local variable of “code.”
Read out data #genIn3 – #genIn10 (I/O-1) in BCD and
assign it to
code
.
Status of I/O-1
#genIn3 #genIn4 #genIn5 #genIn6 #genIn7 #genIn8 #genIn9 #genIn10
OFF OFF OFF ON OFF OFF ON OFF
Input
width:
8
In the above I/O status, the following result will be returned:
For the
dataIn
command, the value of
code
is
18
.
For the
dataInBCD
command, the value of
code
is
12
.
Input Width can be set up to “31.” However, it cannot be extended to a different I/O.
z
The input width ([Input Bit No.]) can be set up to [31]. However, different types of I/O pins cannot
be combined.


































































