





























Features II JS/JSR4400N SCARA Robot
JSG GANTRY Robot
JR2000N Desktop Robot
77
MOVE
■
Move the Z-Axis Alone: upZ, downZ, movetoZ
Only the Z-Axis can be raised or lowered using point job data. These commands belong to the [Move]
command category.
Command Category Command
Parameter
Job
upZ Distance,
Speed
Raise only the Z-Axis by the specified
distance.
downZ Distance,
Speed
Lower only the Z-Axis by the specified
distance.
Move
movetoZ Distance,
Speed
Raise or lower the Z-Axis to the specified Z-
coordinates (absolute coordinates).
z
The [Move] commands are deactivated at points where the (base) point type [CP Passing Point] is
set.
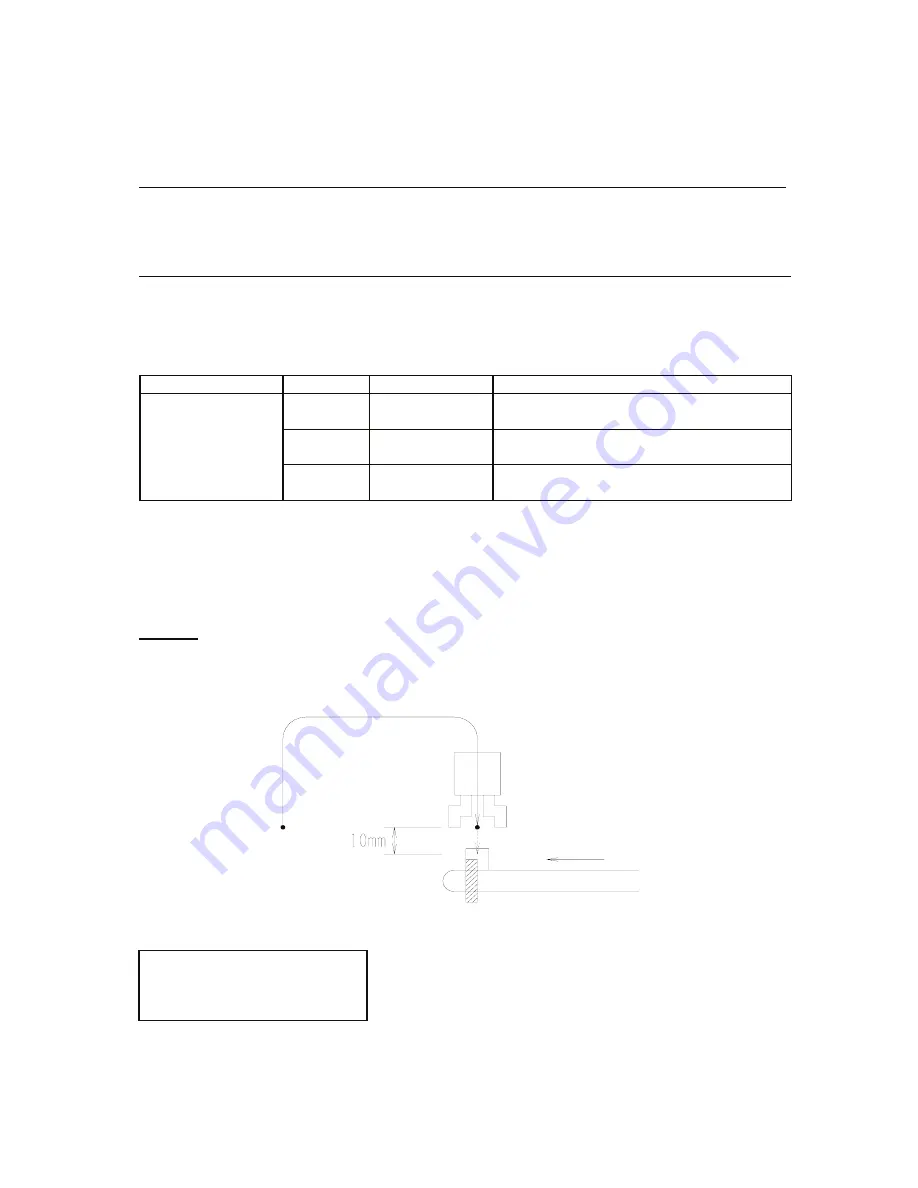
Example
In the PTP drive, stop the hand tool unit 10mm above the workpiece, check whether or not the
workpiece is in place using a sensor, and then lower the tool slowly to hold the workpiece.
Hand Tool Unit
Workpiece
Conveyor Belt
Sensor
waitCond
ld #genIn2
endWait
downZ 10,20
Wait in place until the following condition is met:
#genIn2=ON (Condition)
End of condition
Lower only the Z-Axis by 10mm (at 20mm/sec).







































































