





























VisionControlImage.sys
This module provides some routines to prepare the standard camera for a second
control image. After the control image is grabbed and analyzed, camera is prepared
for normal image again. Normal operation is that robot picks from camera area
after getting the normal results of where to find part. Then robot send command
to prepare camera for second image, moves closer to camera and while holding
the part asks to grab the second control image. After the vision result robot
evaluates and do necessary actions depending on the result and then prepare the
camera for normal operation again.
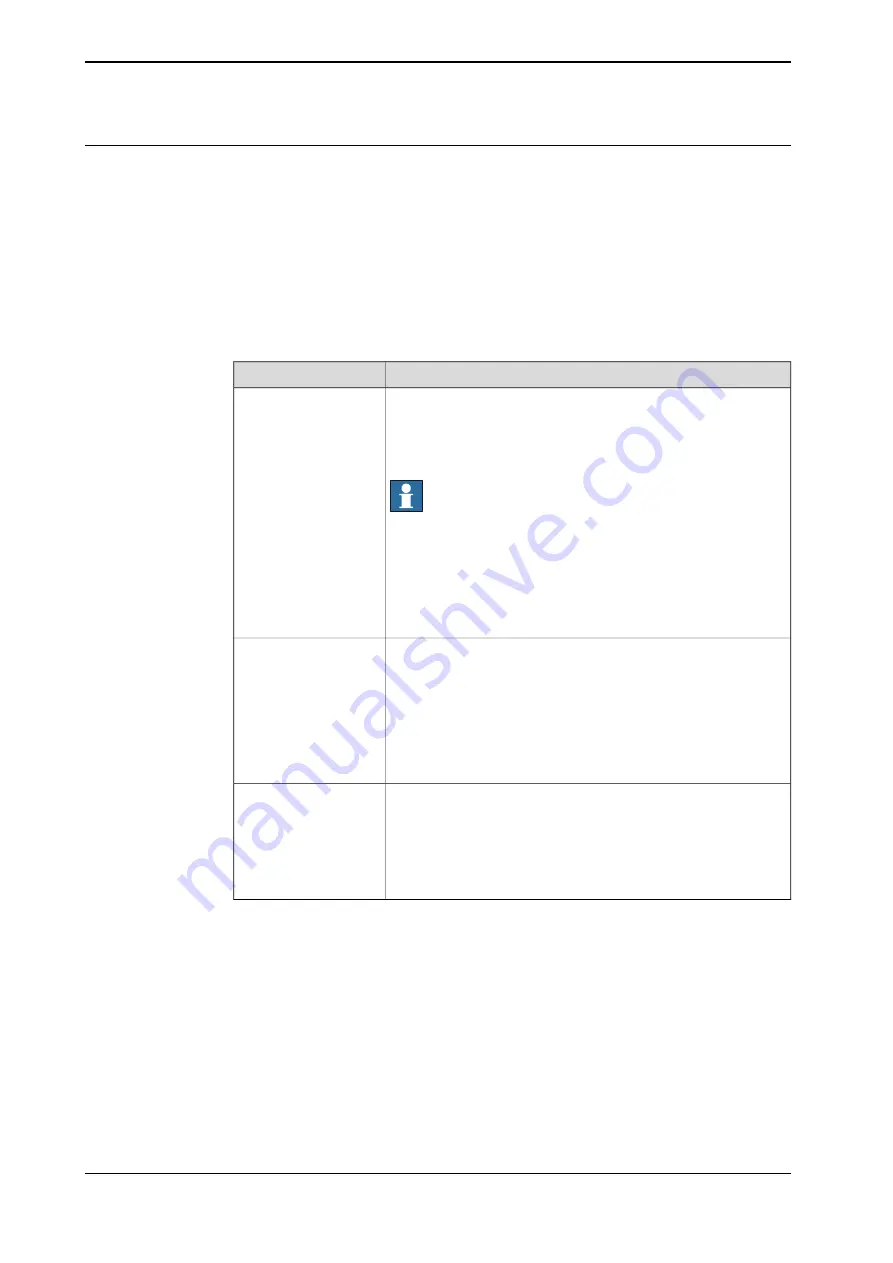
Important routines
Description
Routine
This function is the only thing needed to be called from normal
user program. It prepares camera for second image, call routine
to get robot in position, grabs image, call routine to get the robot
out of camera area, prepare for normal image and then returns
the result of the second image.
Note
This routine will be depending on two movement routines that
must be created inside the part module file. Make sure there is a
MoveToControlImageX routine that moves robot to camera X
second image position and a MoveFromControlImageX that moves
away out of camera X area after image. These instructions should
be purely movements. X is the number of the camera which should
be used for the second image.
FUNC visionres Con-
trolImage(num Camer-
aNumber,\num Con-
trolImagePosi-
tions{*},\num NormalIm-
agePositions{*},\camera-
setting CameraSetting-
sControl,\camerasetting
CameraSettingsNor-
mal,\string BlackRegion-
ValuesControl,\string
BlackRegionValuesNor-
mal,\num MaxImageRe-
tries)
Prepares camera for a normal image. This routine is called from
within ControlImage, but could also be used from user program
like in the initialization phase.
PROC PrepareNor-
malImage(num Camer-
aNumber,\num Position-
sToUse{*},\num Init-
BeltAction,\bool InitAl-
lowAutoGrab,\camera-
setting CameraSettings-
Normal,\string BlackRe-
gionValues)
Prepares camera for the second control image. This routine is
called from within ControlImage, but could also be used from user
program like in the initialization phase.
PROC PrepareCon-
trolImage(num Camer-
aNumber,\num Position-
sToUse{*},\cameraset-
ting CameraSettingsCon-
trol,\string BlackRegion-
Values)
200
Product manual - FlexLoader SC 6000
3HAC051768-001 Revision: D
© Copyright 2014-2020 ABB. All rights reserved.
F FlexLoader RAPID reference
F.2 FlexLoader Vision interface
Continued
Summary of Contents for FlexLoader SC 6000
Page 1: ...ROBOTICS Product manual FlexLoader SC 6000 ...
Page 8: ...This page is intentionally left blank ...
Page 12: ...This page is intentionally left blank ...
Page 78: ...This page is intentionally left blank ...
Page 172: ...This page is intentionally left blank ...
Page 174: ...This page is intentionally left blank ...
Page 176: ...This page is intentionally left blank ...
Page 178: ...This page is intentionally left blank ...
Page 182: ...This page is intentionally left blank ...
Page 184: ...This page is intentionally left blank ...
Page 186: ...This page is intentionally left blank ...
Page 192: ...This page is intentionally left blank ...
Page 224: ...This page is intentionally left blank ...
Page 283: ......





































































