





























Common.sys
Data definitions, world zones, event routines and other stuff general to all cell types
is stored in Common.sys. This system module is accessible by all programs, and
by storing the data in this module all programs always have access to the right
data. Normally there is no additions to this module. When an integrator has general
definitions or other general data, that is preferably stored in CommonCell,
CommonSC3000 or CommonSC6000 depending on current cell type.
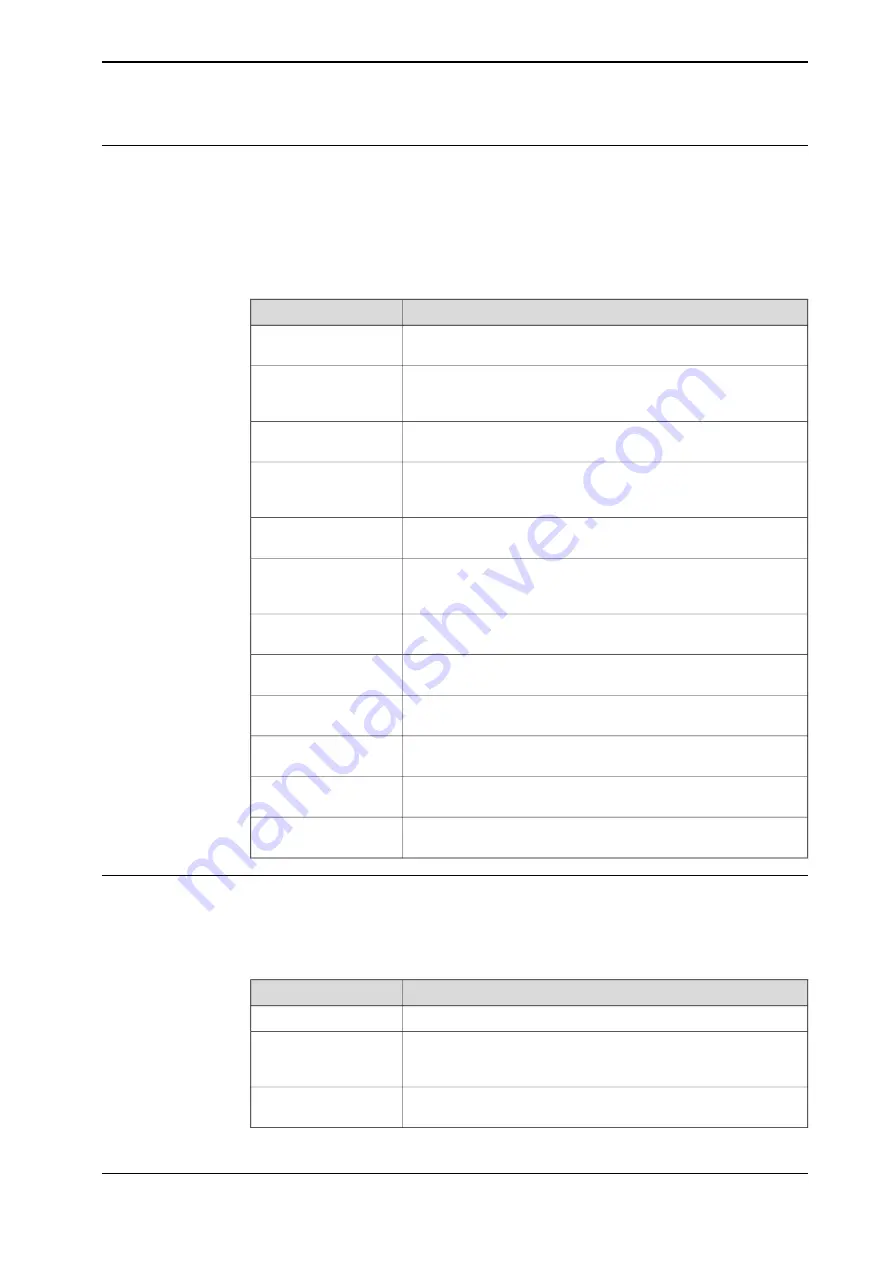
Description
Routine
Reads configured IO:s and loaded modules to set cell specific
configuration switches.
PROC AutoConfigura-
tion()
This routine checks if inconveyor is in position, i.e. ready to take
a new image. It is only to be used if the cell use a in and doesn't
use AUTO_GRAB of images.
FUNC bool CheckInPosi-
tion(num CameraNum-
ber)
Clears parta data for all tools for current calling robot.
PROC Clear-
ToolsPartInfo()
Activates a user-defined area where the robot may never be. This
must normally be positioned directly above the robot so that it
cannot make backward bending movements.
PROC DefForbidden-
Zone()
Activates a user-defined area where it is safe for the robot to start
its program from the start.
PROC DefSafeZone()
Called up automatically when the robot is switched on. From this
routine
DefForbiddenZone
,
DefSafeZone
and
DefMachineZone
are called up.
PROC DefWorldZones()
Finds the closest defined zone to where the robot is located right
now.
FUNC mttargetdata
getClosestZone()
This routine is called on power on event. Fill with suitable code if
needed in application.
PROC PowerOnEvent()
This routine is called on quick stop event. Fill with suitable code
if needed in application.
PROC QStopEvent()
This routine is called on restart event. Fill with suitable code if
needed in application.
PROC RestartEvent()
This routine is called on start event. Fill with suitable code if
needed in application.
PROC StartEvent()
This routine is called on stop event. Fill with suitable code if
needed in application.
PROC StopEvent()
CommonSC6000.sys
CommonSC6000.sys is supplied with FlexLoader. It handles data and routines
general to this machine type.
Standard functionality
Description
Routine
Setup of cell specific stuff.
PROC CellSetup()
Defines a zone inside machine. When the robot is inside this zone
the machine shall not be able to run because of output signal
DOF_LoaderOut.
PROC DefMa-
chineZone()
Calculate and set correct robot speed depending on weight of
part/parts in gripper.
PROC SetSpeed()
Continues on next page
Product manual - FlexLoader SC 6000
205
3HAC051768-001 Revision: D
© Copyright 2014-2020 ABB. All rights reserved.
F FlexLoader RAPID reference
F.3 FlexLoader application functionality
Continued
Summary of Contents for FlexLoader SC 6000
Page 1: ...ROBOTICS Product manual FlexLoader SC 6000 ...
Page 8: ...This page is intentionally left blank ...
Page 12: ...This page is intentionally left blank ...
Page 78: ...This page is intentionally left blank ...
Page 172: ...This page is intentionally left blank ...
Page 174: ...This page is intentionally left blank ...
Page 176: ...This page is intentionally left blank ...
Page 178: ...This page is intentionally left blank ...
Page 182: ...This page is intentionally left blank ...
Page 184: ...This page is intentionally left blank ...
Page 186: ...This page is intentionally left blank ...
Page 192: ...This page is intentionally left blank ...
Page 224: ...This page is intentionally left blank ...
Page 283: ......




































































