





























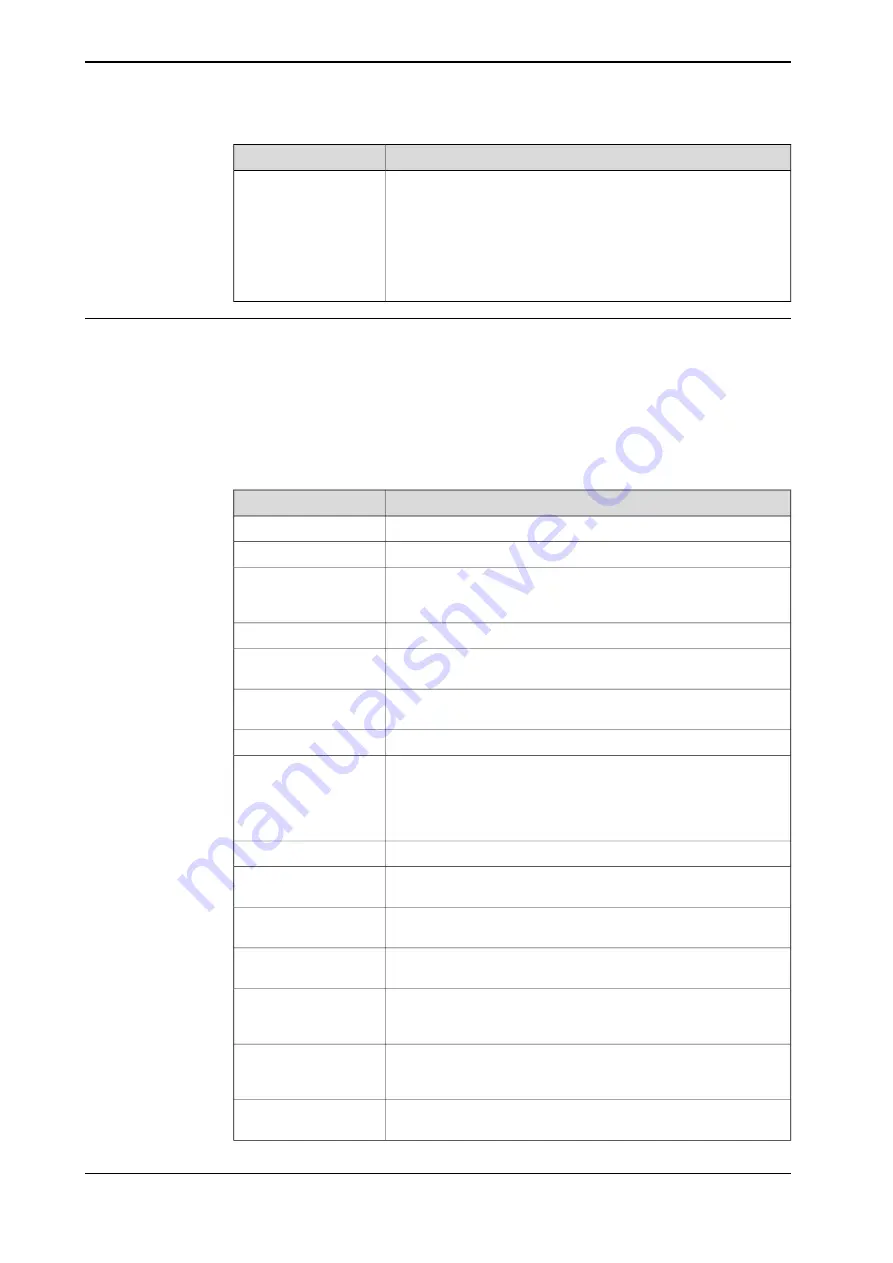
Description
Routine
Does the same as PickPartAtCamera with the addition that it also
can handle to pick multiple parts from one image.
FUNC num PickMulti-
PartsAtCamera(num
CameraNumber,\num
NumberOf-
PartsToPick,\num De-
siredPositions{*},\num
MaxImageRetries,\num
TimeoutTimeVision)
PartCam1.mod
PartCam1.mod is always supplied with FlexLoader Vision. It handles the part
specific programming, e.g. loading, unloading, marking, air cleaning.
Two example modules are delivered, one for operation with simplified TeachIn
(FlexLoader Vision Lite) which is named LitePartCam1.mod, the other for standard
operation with standard TeachIn. Refer to chapter on robot program.
Standard functionality
Description
Routine
Template routine for the air cleaning option.
PROC AirCleanDetail()
Template routine for the deburring unit option.
PROC DeburrDetail()
Part specific handling routine for camera 1 depending in which
position FlexLoader Vision identified the part. Note, this routine
is not always used in the example routines.
PROC Cam1Posi-
tion_n()
Initializes the camera and part specific data.
PROC InitializeCam1()
Leaves a part on an out belt.
PROC LeaveFeed-
er_OUT()
Template routine for the statistical outlet option.
PROC LeaveSampleOut-
let()
Loads a part into the machine, multiply routine if several machines.
PROC LoadMachine()
Handles the main flow of the cell together with main(). This include
to check status of machines and so on to figure out what to do
next. All these kind of selections and checks that are part specific
is placed in this routine. The rest is placed in either of the routines
depending on how the integrator wants the structure.
PROC MainRoutine1()
Template routine for the marking unit option.
PROC MarkDetail()
Moves robot to control image position. Only used if need of second
control image.
PROC MoveToCon-
trolImage()
Moves robot from control image position. Only used if need of
second control image.
PROC MoveFromCon-
trolImage()
This routine performs the actual picking of a part from the conveyor
at camera position.
PROC PickCam_1()
This routine does the same as PickCam_1 but for the case of
picking multiple parts from one image.
PROC PickMultiParts-
Cam_1(num
PartNo,num Position)
This routine is called to approach an intermediate position towards
the conveyor before picking. Update this position to suite the
current application.
PROC RefPosInCam_1()
This is an intermediate position used when leaving the picking
area. Update this position to suite the current application.
PROC RefPosOut-
Cam_1()
Continues on next page
202
Product manual - FlexLoader SC 6000
3HAC051768-001 Revision: D
© Copyright 2014-2020 ABB. All rights reserved.
F FlexLoader RAPID reference
F.3 FlexLoader application functionality
Continued
Summary of Contents for FlexLoader SC 6000
Page 1: ...ROBOTICS Product manual FlexLoader SC 6000 ...
Page 8: ...This page is intentionally left blank ...
Page 12: ...This page is intentionally left blank ...
Page 78: ...This page is intentionally left blank ...
Page 172: ...This page is intentionally left blank ...
Page 174: ...This page is intentionally left blank ...
Page 176: ...This page is intentionally left blank ...
Page 178: ...This page is intentionally left blank ...
Page 182: ...This page is intentionally left blank ...
Page 184: ...This page is intentionally left blank ...
Page 186: ...This page is intentionally left blank ...
Page 192: ...This page is intentionally left blank ...
Page 224: ...This page is intentionally left blank ...
Page 283: ......







































































