





























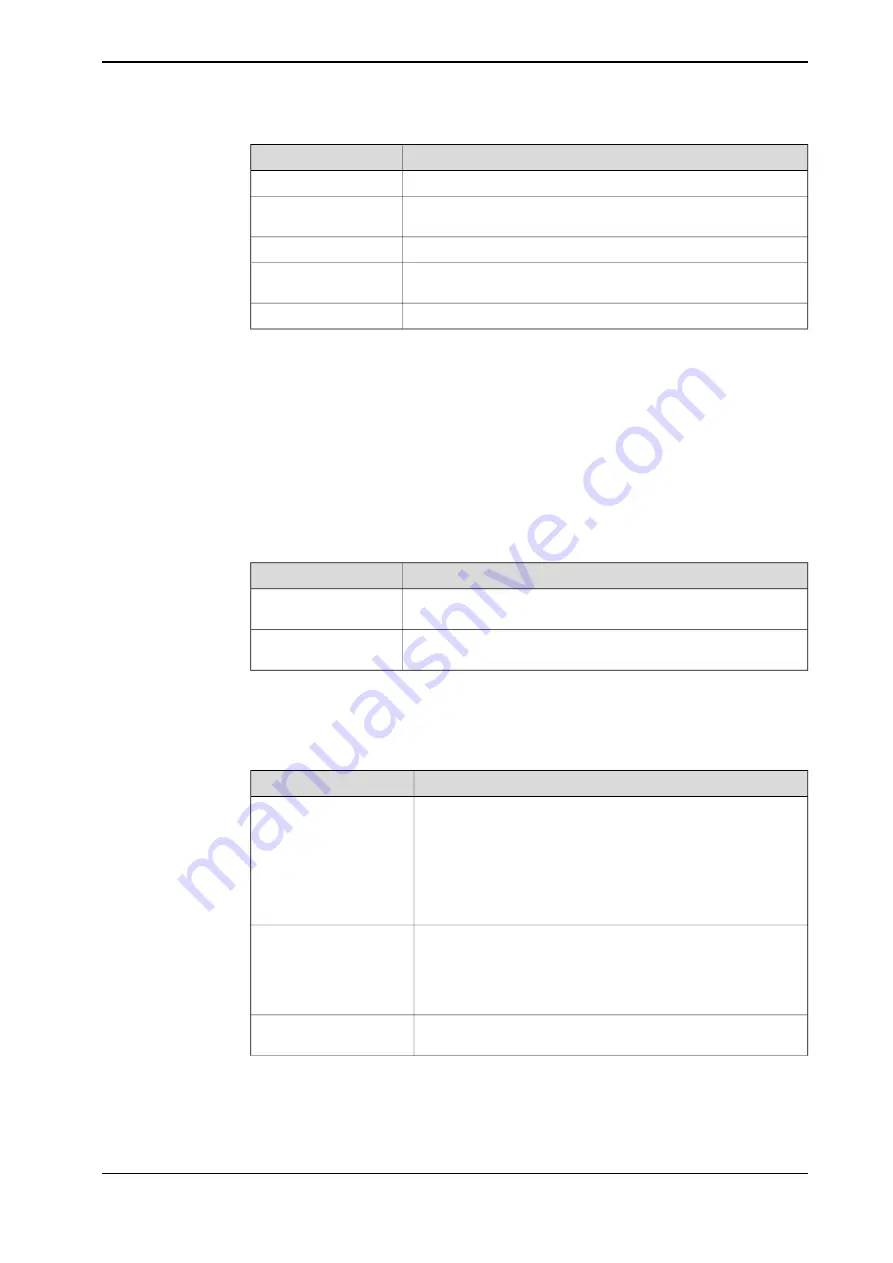
Description
Routine
Template routine for the regrip station option.
PROC ReGripDetail()
This procedure is executed when FlexLoader Vision is stopped.
PROC StopRoutine-
Cam1()
Template routine for the turn station option.
PROC TurnDetail()
Unloads a part from the machine, multiply routine if several ma-
chines.
PROC UnloadMachine()
Template routine for the washer option.
PROC WashDetail()
Additional functionality for FlexLoader Vision Lite use
LitePartCam1.mod for FlexLoader Vision Lite applications contains extended
templates and lathe specific RAPID code than allows for a fully parametric teachin.
Specifically, the MainRoutine1 calls getState() to understand how the machine
should be handle in the specific case and what to do at the moment. Local routines
then cover all allowed combinations for loading and unloading to main and sub
spindel, e.g. LoadMachine_MAIN_UnLoad_SUB, UnloadLeftOverPartMAIN,
LoadMachine_SUB, UnloadMachine_MAIN_Load_MAIN.
A couple of routines is handling calling actions for selected options. Those might
need changes or additions.
Description
Routine
Operations that shall be done with the part after unloading from
machine tool. Change according application.
PROC PerformFinishin-
gOptions()
Operations that shall be done with the part prior to loading into
the machine tool. Change according application.
PROC PerformPrepare-
Options()
Machine tool handling procedures and functions
Note that the GLOBAL procedures (like LoadMachine_MAIN) are called from the
MainRoutine and perform logical work, whereas the LOCAL routines (like LoadMAIN)
perform the actual movement work.
Description
Name
This procedure is for moving the robot into the machine. Add
positions here if necessary.
LOCAL PROC EnterMa-
chine(\switch Grip-
per1FaceMAIN|switch
Gripper1FaceSUB)
In this example code, pViaMachine1/pViaMachine2 is a position
inside the machine where both chucks are reachable and the
gripper could turn around without crashing.
pViaMachine1 is placed with gripper 1 facing the main chuck.
pViaMachine2 is placed with gripper 1 facing the sub chuck.
This procedure is for moving the robot out of the machine. Add
positions here if necessary.
LOCAL PROC ExitMa-
chine(\switch Grip-
per1FaceMAIN|switch
Gripper1FaceSUB)
pViaMachine1/pViaMachine1 see above. In this example code,
pViaMachine is a position just outside the machine tool where
the robot can request the machine to close its door.
This procedure is for loading the main chuck in the machine
tool.
PROC LoadMa-
chine_MAIN()
Continues on next page
Product manual - FlexLoader SC 6000
203
3HAC051768-001 Revision: D
© Copyright 2014-2020 ABB. All rights reserved.
F FlexLoader RAPID reference
F.3 FlexLoader application functionality
Continued
Summary of Contents for FlexLoader SC 6000
Page 1: ...ROBOTICS Product manual FlexLoader SC 6000 ...
Page 8: ...This page is intentionally left blank ...
Page 12: ...This page is intentionally left blank ...
Page 78: ...This page is intentionally left blank ...
Page 172: ...This page is intentionally left blank ...
Page 174: ...This page is intentionally left blank ...
Page 176: ...This page is intentionally left blank ...
Page 178: ...This page is intentionally left blank ...
Page 182: ...This page is intentionally left blank ...
Page 184: ...This page is intentionally left blank ...
Page 186: ...This page is intentionally left blank ...
Page 192: ...This page is intentionally left blank ...
Page 224: ...This page is intentionally left blank ...
Page 283: ......







































































