





























Chapter 15. The PID functions
15-17
1) SV (setting value : the designated value) and PV (process value : present value) of
GM6 PID operation have the range 0 ~ 4000. The range is set with the
consideration of the resolution of A/D and D/A module of GM6 series (12 bits) and
offset value.
2) The BIAS data is used for the compensation of offset in the proportional control.
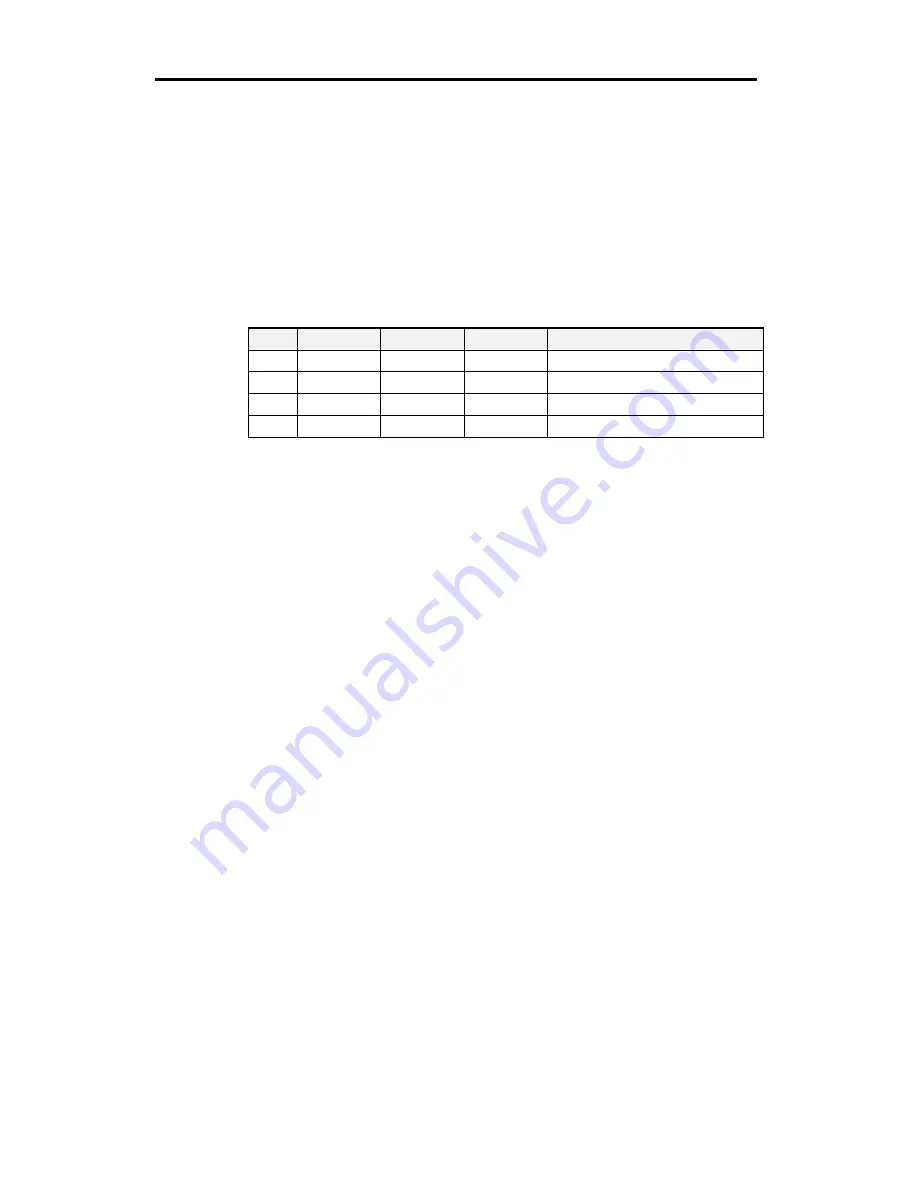
3) In GM6-CPUB and GM6-CPUC, only the following 4 operation modes are available.
Other operation modes, such as PD or I, are not permitted.
No.
EN_P
EN_I
EN_D
Operation
1
1 (enable)
0 (disable)
0 (disable)
P operation
2
1 (enable)
1 (enable)
0 (disable)
PI operation
3
1 (enable)
1 (enable)
1 (enable)
PID operation
4
0 (disable)
0 (disable)
0 (disable)
On/Off operation
4) The GM6 CPU module can handle only integer, not the floating point type.
Therefore, to enhance the accuracy of PID operation, the PID6CAL function block is
designed to input the P_GAIN data as the 100 times scaled up. For example, if the
designated P_GAIN is 98, actual input data of P_GAIN should be 9800. If the
designated P_GAIN is 10.99, input 1099 to the P_GAIN.
5) I_TIME and D_TIME are 10 times scaled up. For example, input 18894 if the
designated I_TIME value is 1889.4. The range of actual input is 0 ~ 20000.
6) S_TIME is the period of reading data (sampling), and also 10 times scaled up.
Generally, it should be synchronized with external trigger input (EN input of function
block) to perform proper PID operation. The range of sampling time is 0.1 ~ 10
seconds, and actual input range is 0 ~ 100.
7) REF may be useful parameter according to the control system type, especially
velocity, pressure, or flux control system. The REF input is also 10 times scaled up,
and the actual range is 0 ~ 10.
8) TT (tracking time constant) parameter is used to cancel anti -windup operation. The
range of TT is 0.01 ~ 10 and the actual input range that are 100 times scaled up is
0 ~ 1000.
9) N (high frequency noise depression ratio) parameter is used for derivative control
operation, and shows the ratio of high frequency noise depression. If there is a lot
of high frequency noise in the control system, select the N value as higher value.
Otherwise, leave the N parameter as 1. The range of N is 0 ~ 10 and it is not scaled
up, so input the designated value directly.







































































