





























Chapter 15. The PID functions
15-16
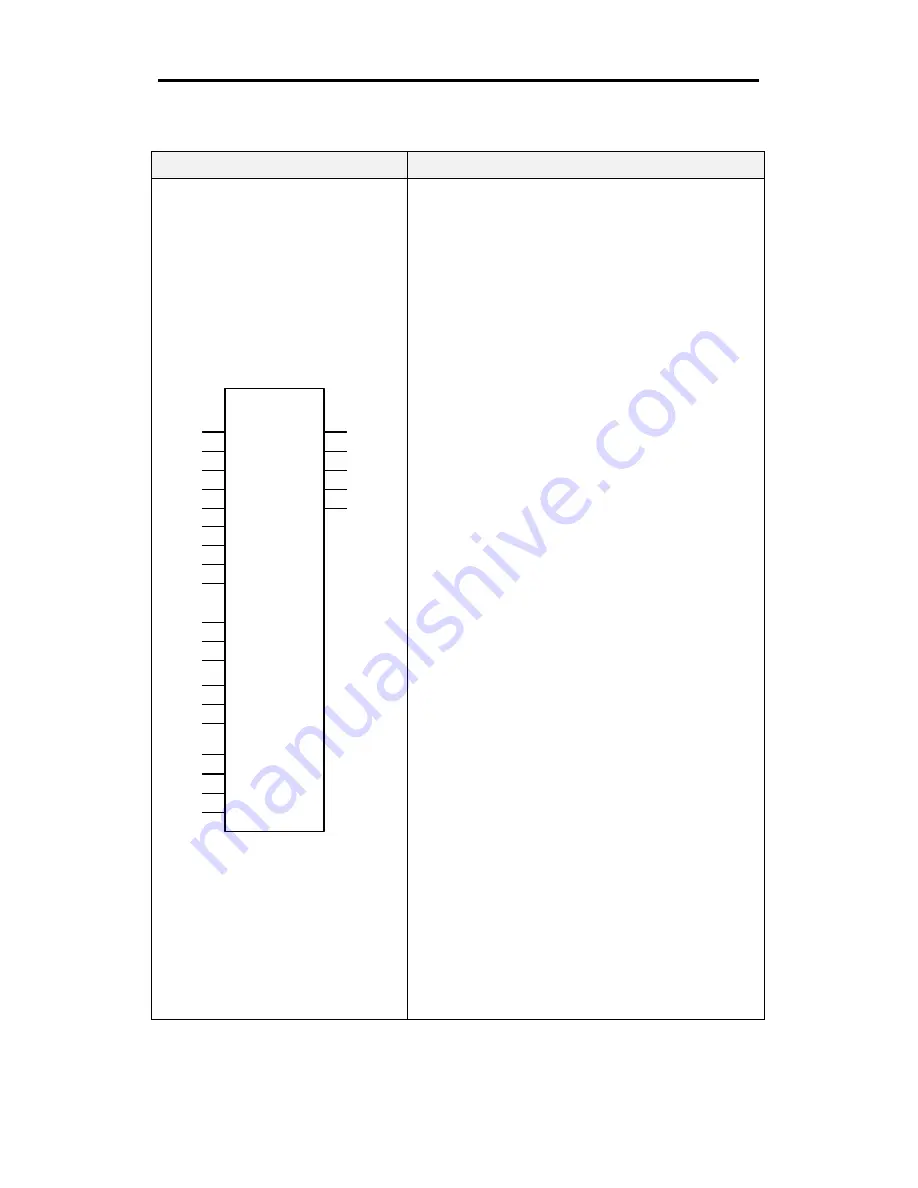
15.3.1 The function block for PID operation (PID6CAL)
Function block
Description
Input
EN : enable signal of the PID6CAL F/B
MAN : manual operation mode
( 0 : auto, 1 : manual )
D / R : select direction of operation
( 0 : forward, 1 : reverse )
SV : set value data input
( input range : 0 ~ 4000 )
PV : present value data input
BIAS : feed forward or offset value input for
disturbance compensation
( input range : 0 ~ 4000 )
EN_P : enable signal of proportional control
( 0 : disable, 1 : enable )
EN_I : enable signal of integral control
( 0 : disable, 1 : enable )
EN_D : enable signal of derivative control
( 0 : disable, 1 : enable )
P_GAIN : the proportional gain constant
( range : 0.01 ~ 100.00 )
I_TIME : the integration time
( range : 0.0 ~ 2000.0 )
D_TIME : the deviation time
( range : 0.0 ~ 2000.0 )
MV_MAX : the maximum value of MV
( range : 0 ~ 4000 )
MV_MIN : the minimum value of MV
( range : 0 ~ 4000 )
MVMAN : the input data of manual operation mode
( range : 0 ~ 4000 )
S_TIME : operation scan time
( range : 0.1 ~ 10 )
REF : the reference value
( range : 0.1 ~ 1 )
TT : tracking time constant
( range : 0.01 ~ 10.00 )
N : high frequency noise depression ratio
( range : 1 ~ 10 )
Output
DONE : completion flag of PID operation
MV : output manipulation value
( range : 0 ~ 4000 )
STAT : error code output
Q_MAX : shows MV is limited with maximum value
Q_MIN : shows MV is limited with minimum value
PID6CAL
EN
MAN
D/R
SV
PV
EN_I
DONE
MV
BOOL
BOOL
BOOL
INT
INT
BOOL
BOOL
INT
EN_D
BOOL
STAT
USINT
BIAS
INT
EN_P
P_GAIN
I_TIME
MV_MAX
UINT
UINT
UINT
MV_MIN
UINT
D_TIME
UINT
S_TIME
UINT
MVMAN
UINT
Q_MAX
BOOL
Q_MIN
BOOL
REF
UINT
TT
UINT
N
UINT
BOOL







































































