

























9.1 Coordinated Motion Instructions
9-2
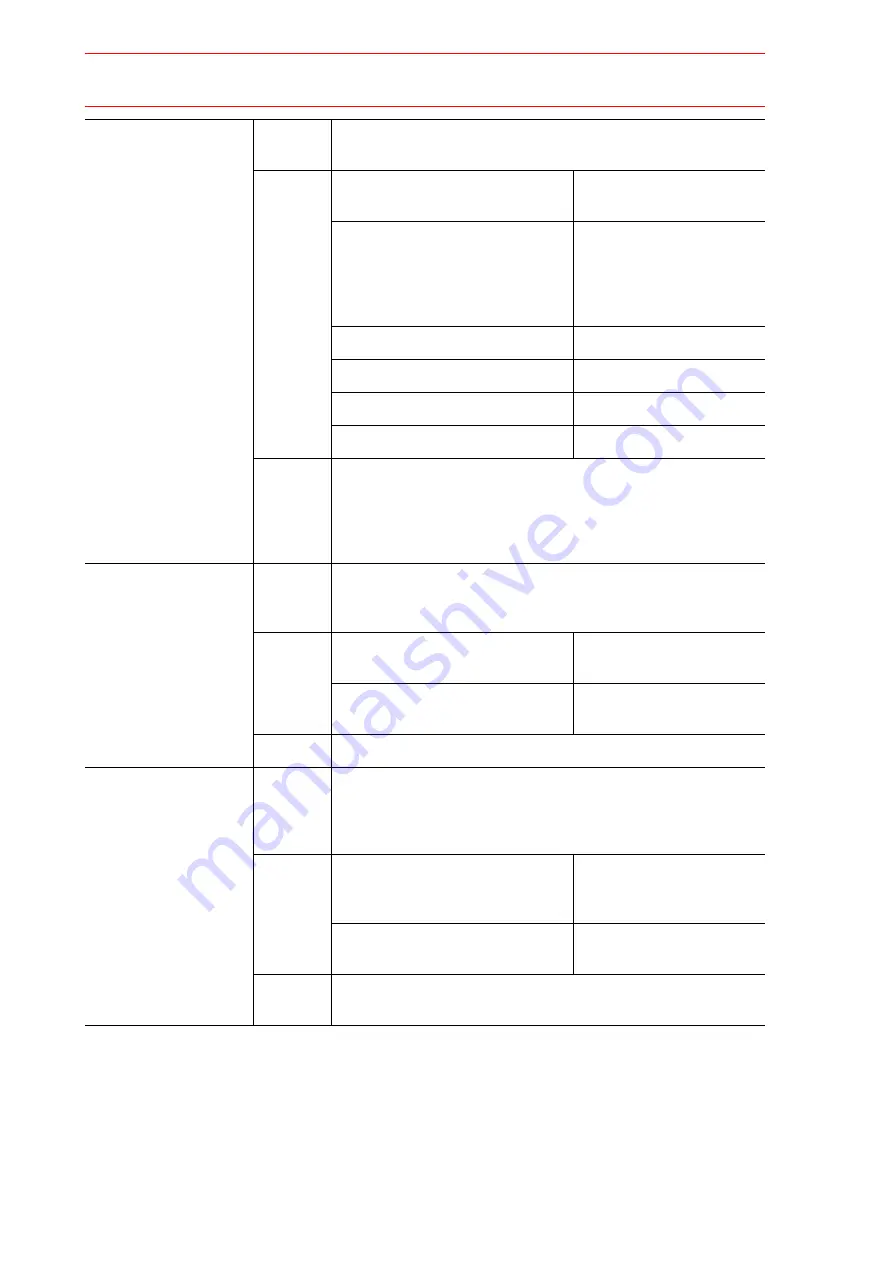
SIMOV
Function
While coordinating the slave side with the master side, moves
by only the specified increments with linear interpolation.
Addi-
tional
Item
P <variable No.>,
BP <variable No.>
V=<play speed>,
VR=<play speed for posture>,
VS=<speed at reach point>
V: 0.1 to 1500.0 mm/s
0.6 to 9000.0 cm/min
VR: 0.1 to 180.0
/s
VS: 0.1 to 1500.0 mm/s
0.6 to 9000.0 cm/min
PL = <position level>
PL: 0 to 8
UNTIL statement
NWAIT
+IMOV instruction
Example SIMOV P000 V=138 PL=1
+IMOV P001
SIMOV P001 BP002
+IMOV P000
SREFP
Function
During coordinated movement, specifies a reference point
such as wall point for weaving. (Reference point instruction to
the slave side manipulator)
Addi-
tional
Item
Position data, base axis position
data
These data do not appear
on the screen.
<Reference point No.>
Wall point 1 for weaving: 1
Wall point 2 for weaving: 2
Example SREFP 1
+MOVJ
Function
The master side moves to the teach position with joint interpo-
lation. This instruction should always be placed after a coordi-
nated move instruction (individual interpolation). (Coordinated
move instruction to the master side manipulator)
Addi-
tional
Item
Position data,
base axis position data,
station axis position data
These data do not appear
on the screen.
VJ=<play speed (%)>
Effective in parameter set-
ting
Example MOVL=138 PL=0
+MOVJ
199/210







































































