





























2.9 Registering Move Instruction (S)MOV
+MOVJ
2-23
2.9.2
Operating Slave Side (Manipulator)
Operation
Explanation
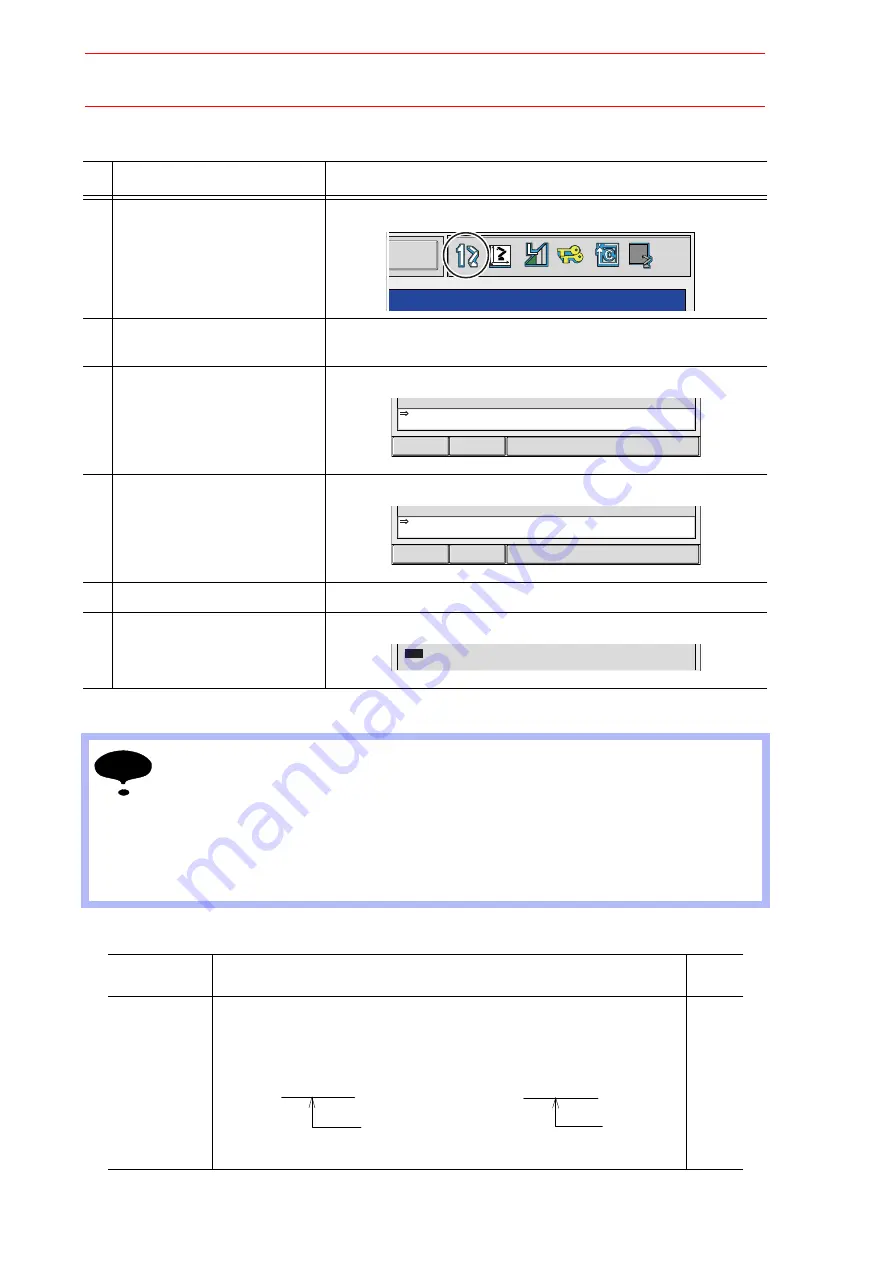
1
Press [EX. AXIS].
The slave side (manipulator) is selected for axis handling.
2
Press the axis key to move to
the desired position.
3
Select either a coordinated
interpolation or an indepen-
dent interpolation.
Press [SMOV] to select either interpolation.
4
Select an interpolation type.
Press [MOTION TYPE] to select an interpolation type.
5
Confirm the speed.
6
Press [ENTER].
The registration is completed as follows.
• When joint interpolation is set for the slave side (manipulator), teaching cannot be done
during a coordinated operation.
• When “JOINT” is selected, the interpolation type will not change to a coordinated interpo-
lation, even if [SMOV] is pressed.
• When “JOINT” is selected during coordinated interpolation, a coordinated move instruc-
tion such as “SMOVL” in the input buffer line changes to “MOVJ,” and the interpolation
type becomes individual interpolation.
Parameter
Contents and Set Value
Initial
Value
S2C164
Specifies whether the speed inputting for move instructions of the
master side robot in a coordinated job is permitted or not.
0
<Example>
0: Not Provided
1: Provided
SMOVL
V=100
SMOVL
V=100
+MOVJ
Master
side
Speed speci-
fication not
provided
+MOVJ
VJ=10.00
Master
side
Speed spec-
ification
provided
TILITY
Short Cut
Main Menu
SMOVL V=138
+MOVJ
SMOVC V=138
+MOVJ
Short Cut
Main Menu
0003
SMOVC V=138
+MOVJ
NOTE
38/210







































































