




























40
4: Internal multi section speed
command
5: Point running
P1-16
100ms
Speed instruction acceleration time T
SACC
P1-17
100ms
Speed instruction deceleration time T
SDEC
P1-18
10ms
Speed instruction S curve smoothing time
T
SL
P3-00
~
P3-31 When using the internal speed
Internal Multi-speed parameters
P1-53
0
:
Free stopping
1
:
Stopping at zero speed
Stop mode
P1-46
300%
Forward maximum torque limit
P1-47
300%
Reverse maximum torque limit
P5-04
350
Speed regulator proportional gain KVP
P5-05
10
Speed regulator integration time constant
5.5 Torque control mode debugging steps
The torque control mode is the size of the output torque of the motor. Mainly used in the material of the force has strict requirements of the
winding and winding device, such as winding device or pull fiber device, some tension control occasions, torque setting according to the change
of the radius of the winding change, to ensure that the material force will not change with the radius of the wound.
5.5.1 Torque control mode debug step:
1)
According to the wiring of section 3.10
2)
Servo JOG test run through the key to confirm the normal operation of the motor.
3)
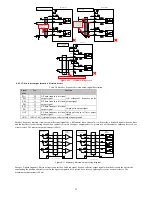
Refer to the section 3.10.3 wiring commands for the DI/DO and the source of the torque command, speed limit, etc..
4)
To carry out the relevant setting of the torque mode.
5)
Enable the servo, and then set a lower speed limit value, give a forward or reverse torque command to the servo application, make confirm
whether the motor rotation direction and speed are correct, if it‘s normal , then you can start to use.
5.5.2 Mainly related to the function codes of torque control mode:
Mainly related to the function codes of torque control mode
Function
code
Reference value
Description
P1-00
2: Torque control mode
Control mode selection
P1-48
0: Internal limit [P1-46, P1-47]
1: Analog 1 limit, while limited by P1-46, P1-47
2: Analog 2 limit, while limited by P1-46, P1-47
3: Not used
Torque limit source selection
P4-00
100%
Internal digital torque given
P4-01
100rpm
Speed limit of torque control
P1-22
100us
Speed limit of torque control
P1-46
300%
Forward maximum torque limit
P1-47
300%
Reverse maximum torque limit
P5-04
350
Speed regulator proportional
gain KVP
P5-05
10
Speed regulator integration time
constant
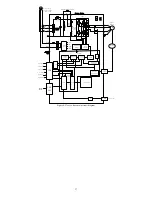
5.6 Gain parameter adjustment strategy
The drive includes three control loops: current loop, speed loop and position loop. The control block diagram is as follows:
Position
controll
er
Speed
controll
er
Filter
Current
controll
er
Powe
r
conv
ersio
n
M
PG
Current
loop
Speed
loop
Position
loop
Position
instruc
tion
Speed
instruction
+
-
+
-
+
-
Servo
motor
Current
detect
Three block diagram of servo system
In theory, the inner control loop bandwidth must be higher than the outer, otherwise the whole control system will be unstable and cause
vibration or is a response to the poor, so three control loop bandwidth relationship should be as follows:
Bandwidth of position loop < Bandwidth of speed loop < Bandwidth of current loop







































































