





























58
Data size
:
16bit
Display mode
:
Decimal system
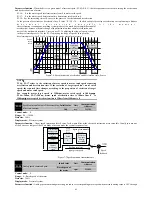
Parameter function
:
Show current single loop position value high 5bits of 17 bit encoder feedback.
Single loop position value =10000*P0-25+P0-24
For example
:
P0-26
The current total inertia load - continuous
detection
Initial value
Unit
Communication
Address
0
kg*cm
2
001AH
Control mode
:
P S
Data size
:
16bit
Display mode
:
Decimal system
Parameter function
:
Show identification of the total value of the load of the total inertia, when servo drive is online inertia identification.
Total load inertia =
Motor i Load inertia
P0-27
Current load inertia ratio - continuous
detection
Initial value
Unit
Communication
Address
0
%
001BH
Control mode
:
P S
Data size
:
16bit
Display mode
:
Decimal system
Parameter function
:
Show the ratio of the real time value of the load inertia and the inertia of the motor, when servo drive is online inertia
identification
P0-28
Total number of feedback pulses
Initial value
Unit
Communication
Address
0
ppr
001CH
Control mode
:
P
Data size
:
32bit
Display mode
:
Decimal system
Parameter function
:
Show the total number of the rotation of the servo motor ,it‘s useful only in the position control mode.
Note: This value may be more than five, please check the high data through the left shift key.
P0-30
Received external pulse frequency
Initial value
Unit
Communication
Address
0
KHz
001EH
Control mode
:
P
Data size
:
32bit
Display mode
:
Decimal system
Parameter function
:
Show the number of external pulses that are collected in the position adjustment cycle, it‘s only useful in the position
control mode.
7.2 P1-xx Basic control parameters
P1-00
Control mode selection
Initial value
Unit
Communication
Address
1
-
0100H
2100H
Control mode
:
P S T
Range
:
0
~
5
Data size
:
16bit
Display mode
:
Decimal system
Parameter function
:
Select control mode of servo system
P1-00=0
:
Speed control mode
Servo drive works in speed control mode, which can determine the speed of the motor running through communication, analog and multi
section speed.
P1-00=1
:
Position control mode
Servo drive works in position control mode, which can determine the position of the motor running through the external position pulse and
the multi section position.
P1-00=2
:
Torque control mode
Servo drive works in the torque control mode, which can determine the output torque of the motor through communication and analog.
P1-00=3
:
Speed- position switching mode
Servo drive works in speed -position switching mode , please set P1-00=3 and external DI
p i n f u n c t i o n c o d e s e l e c t M S E L f u n c t i o n s . A t t h i s p o i n t , s e r v o d r i v e c a n s w i t c h b e t w e e n
speed control mode and position control mode.
P0-24
P0-25
Single loop
position value
=
10000*15+131=150131
00131
00015







































































