





























KINOVA
®
Gen3 Ultra lightweight robot
User Guide
123
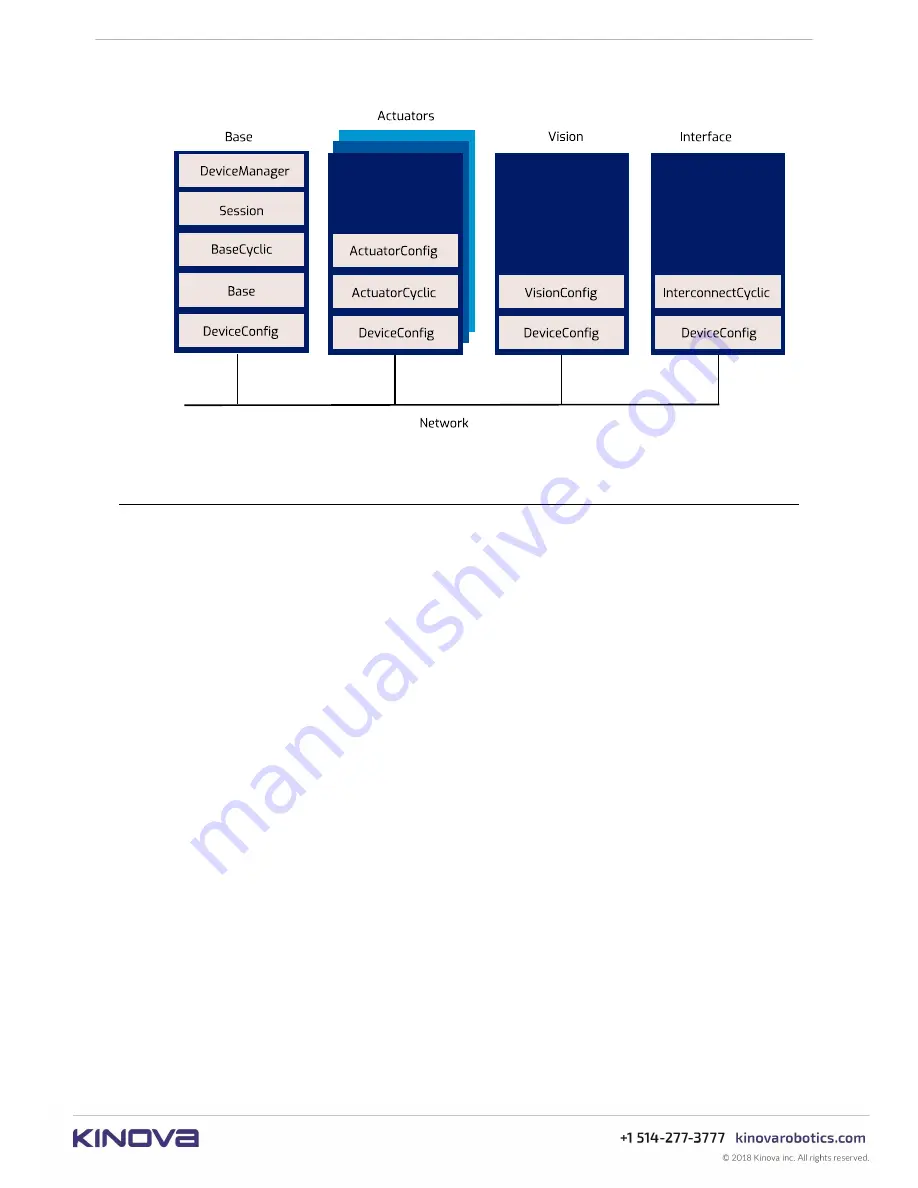
Figure 66: Services on multiple devices
Available services
This section lists the available robot services.
Kinova makes available a number of services for developers, each of which includes functions
and data types supported for C++ and Python.
•
Session
- provides functions for opening and closing sessions with the robot. This service is
used at the beginning and end of every session with the robot to authenticate the user.
Note:
In practice, end users will not use the Session service directly, but will use a
SessionManager
object. See the GitHub documentation for more details.
•
Base
- broadly useful service. Provides functions for configuring a range of base-related
functionalities as well as high-level control for the robot.
•
DeviceManager
- provides a list of device information used for internal communication
routing purposes.
• Cyclic data communications (sending commands to devices and/or receiving status feedback
on a periodic or as-requested basis). Cyclic data communications are used with low-level
servoing, and are intended to be called by API clients as part of a user-defined 1 kHz control
loop.
º
For low-level servoing cyclic communication
•
BaseCyclic
- sending commands to actuators and interface module, obtain feedback
from base, actuators and interface module
• Configuration related
º
ActuatorConfig
- get / set actuator configuration
º
DeviceConfig
- get / set general device configuration
º
VisionConfig
- get / set vision module configuration







































































