





























KINOVA
®
Gen3 Ultra lightweight robot
User Guide
53
• arm present detection
• 6-axis accelerometer / gyroscope
Actuator sensors
• motor phases current sensors (one per phase)
• motor phases temperature sensors (one per phase)
• CPU temperature sensor
• input voltage sensor
• Hall effect sensors for BLDC motor drive
• absolute rotary position encoder
• incremental rotary position encoder
• torque sensors
Interface module sensors
• voltage monitoring (future enhancement)
• temperature sensor (CPU, accelerometer and dedicated)
• 6-axis accelerometer / gyroscope
Access to sensors data
Data from some sensors can be read by users using the APIs or through the Monitoring page of
the Web Application.
The API method
RefreshFeedback()
in the
BaseCyclic
API
service
returns a data structure
with
readings from sensors in the base, actuators, and interface. For detailed information on how
to
unpack this data in an application, see the
BaseCyclic
API documentation.
The following tables give more information about the sensor data.
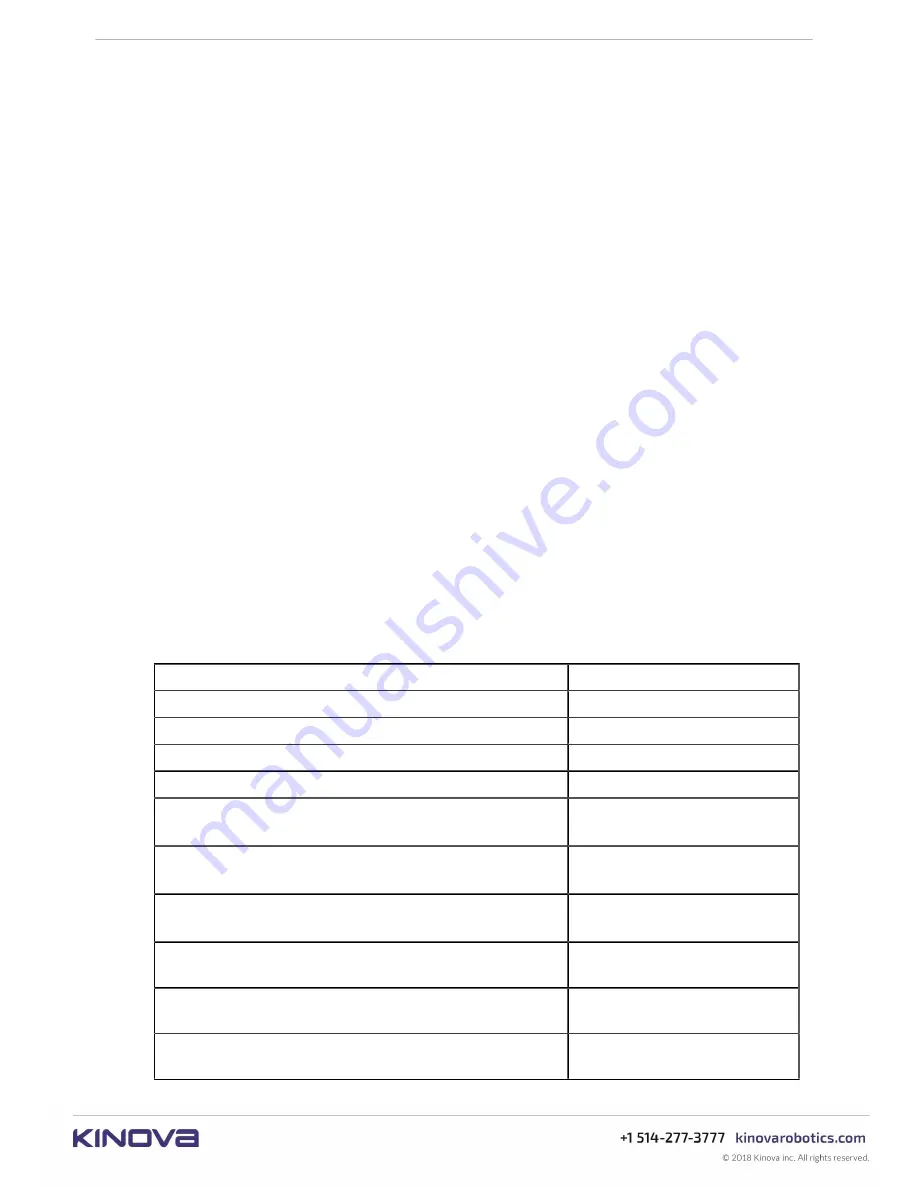
Base readings available
Table 19: Base readings available through API
Field name
Description
arm_voltage
arm voltage in V
arm_current
arm current in A
temperature_cpu
CPU temperature in °C
temperature_ambient
ambient temperature in °C
imu_acceleration_x
IMU measured acceleration (X-Axis)
of base in m / s
2
imu_acceleration_y
IMU measured acceleration (Y-Axis)
of base in m / s
2
imu_acceleration_z
IMU measured acceleration (Z-Axis)
of base in m / s
2
imu_angular_velocity_x
IMU measured angular velocity (X-
Axis)
ω
x
of base in ° / s
imu_angular_velocity_y
IMU measured angular velocity (Y-
Axis)
ω
y
of base in ° / s
imu_angular_velocity_z
IMU measured angular velocity (Z-
Axis)
ω
z
of base in ° / s
































































