





























Note:
1.
The PLC can control 10 axes servo drives at the same time.
2.
PLC COM4 communication parameters keep default value. If it needs to change, please
use XINJEConfig software to set the parameters. The configureation method please refer
to appendix 1.
3.
The servo configuration method please refer to appendix 2.
4.
It cannot only cut the power of servo drive when the PLC and servo power on.
2-1-3. PLC software
XDC series PLC needs to use XDPpro software (v3.2.1a and higher version).
2-2. Instructions
Motion fieldbus instructions:
Instruction
Function
Soft component
Chapter
MOTO
Incremental position motion
MOTO pos spd acc axNs
6-2-1
MOTOA
Absolute position motion
MOTOA pos spd acc axNs
6-2-2
MOTOS
Multi-segment speed run
MOTOS data para axNs
6-2-3
MOSTOP
Stop running
MOSTOP para axNs
6-2-4
MOGOON
Continue running
MOGOON axNs
6-2-5
MOSYN
Synchronous run
MOSYN para syn_axNs axNs
6-2-6
MOUSYN
Release synchronous run
MOUSYN axNs
6-2-7
MOWRITE
Write the present position
MOWRITE data axNs
6-2-8
MOREAD
Read the present position
MOREAD data axNs
6-2-9
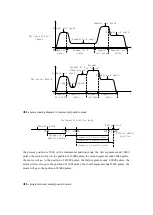
2-2-1. Incremental position motion [MOTO]
1. Instruction summarize
The instruction will run with incremental position, it can real-time change the target absolute






















































