





























Return origin in forward direction, no close signal:
limit
origin
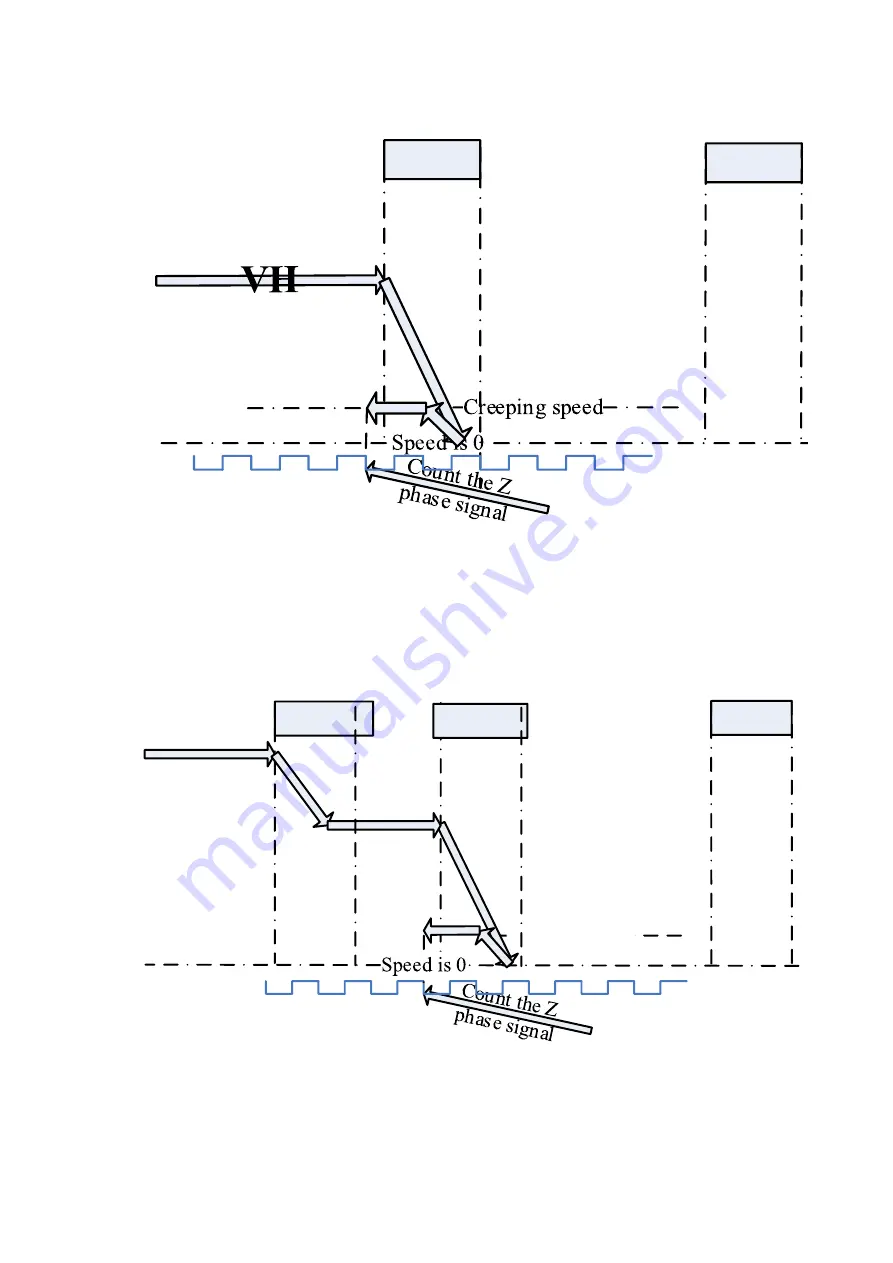
motion description: the motor returned origin with VH speed, it touched rising edge of origin
signal and the speed become 0, then it returned origin in reverse direction with creeping speed, it
searched servo Z phase signal when it touched falling edge of origin signal, it stop moving after
found the Z phase signal.
Return origin in forward direction, there is close signal:
If the origin signal is long:
VH
limit
origin
Creeping speed
Close
point
VL






















































