




























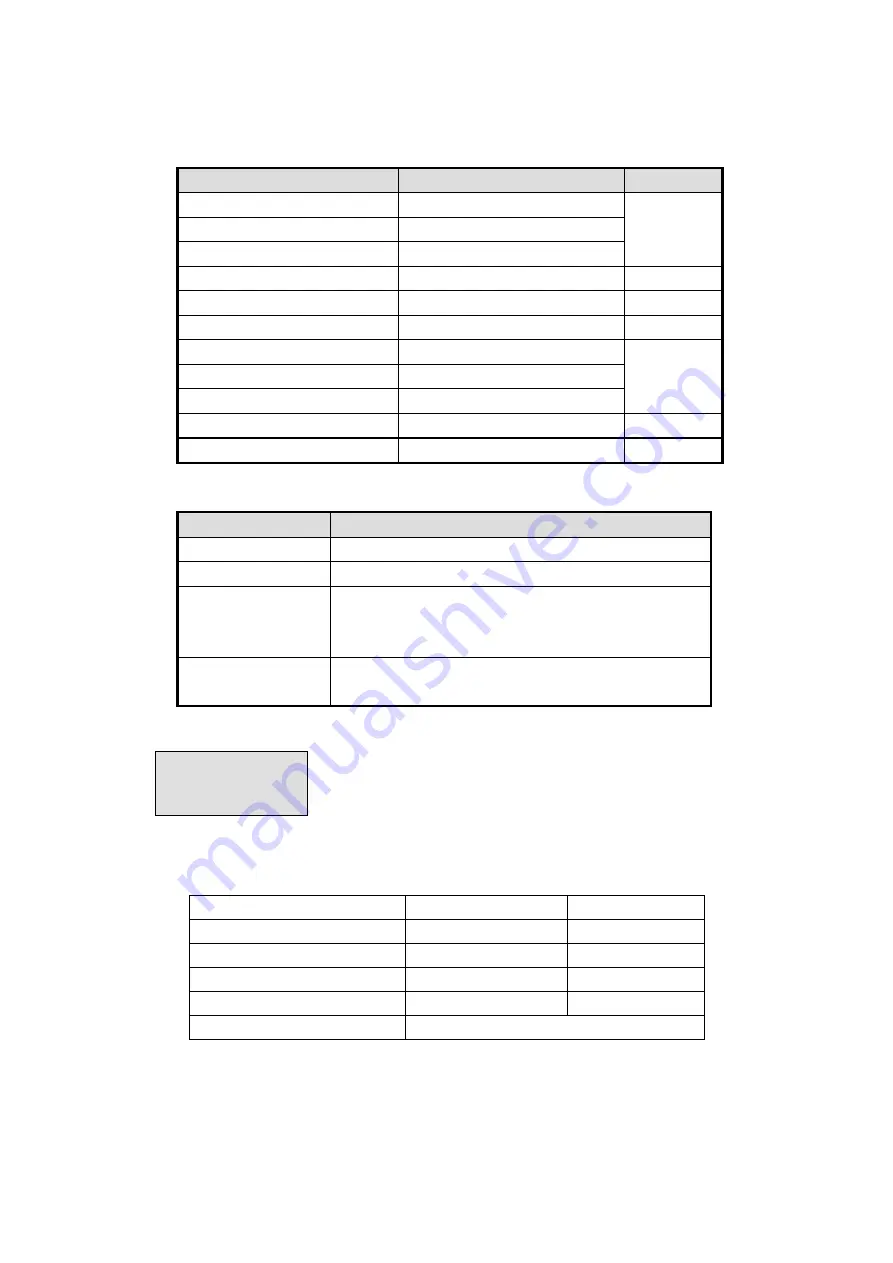
Data starting address:
Address
Contents
Notes
S0+0 (double words)
Position
Segment 1
S0+2 (double words)
Speed
S0+4
Reserved
S0+6
Reserved
S0+8
Reserved
…
…
…
S0+(N-1)*10+0 (double words)
Position
Segment N
S0+(N-1)*10+2 (double words)
Speed
S0+(N-1)*10+4
Reserved
S0+(N-1)*10+6
Reserved
S0+(N-1)*10+8
Reserved
Parameter starting address:
Address
Contents
S1+0 (double words)
32-bit integer, motion mode (0: relative, 1: absolute)
S1+2 (double words)
32-bit integer, motion segment (1~100)
S1+4 (double words)
32-bit integer, acceleration time (the time accelerate from
0 to the first segment speed, the following speed
changing is same to this acceleration speed), unit: ms
S1+6 (double words)
32-bit integer, deceleration time (the time decelerate
from the last segment speed to 0), unit: ms
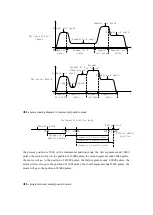
It outputs four segments of pulse by MOTOS instruction. The speed is changed to 6000Hz at the
second segment. Each segment parameters are shown as below:
Name
Frequency (Hz)
Pulse numbers
Segment no.1
5000
10000
Segment no.2
1000
26000
Segment no.3
7500
-20000
Segment no.4
4000
25000
Acceleration/deceleration time
50ms
◆
The running diagram:
Application





















































