



























4 System coil and register
When XDC series PLC connect to fieldbus servo system, the default can connect 10-axis, the max
can connect up to 20-axis. The parameters of 10-axis and 20-axis are different. PLC parameters
please refer to the following table, the servo parameters should be changed at the same time.
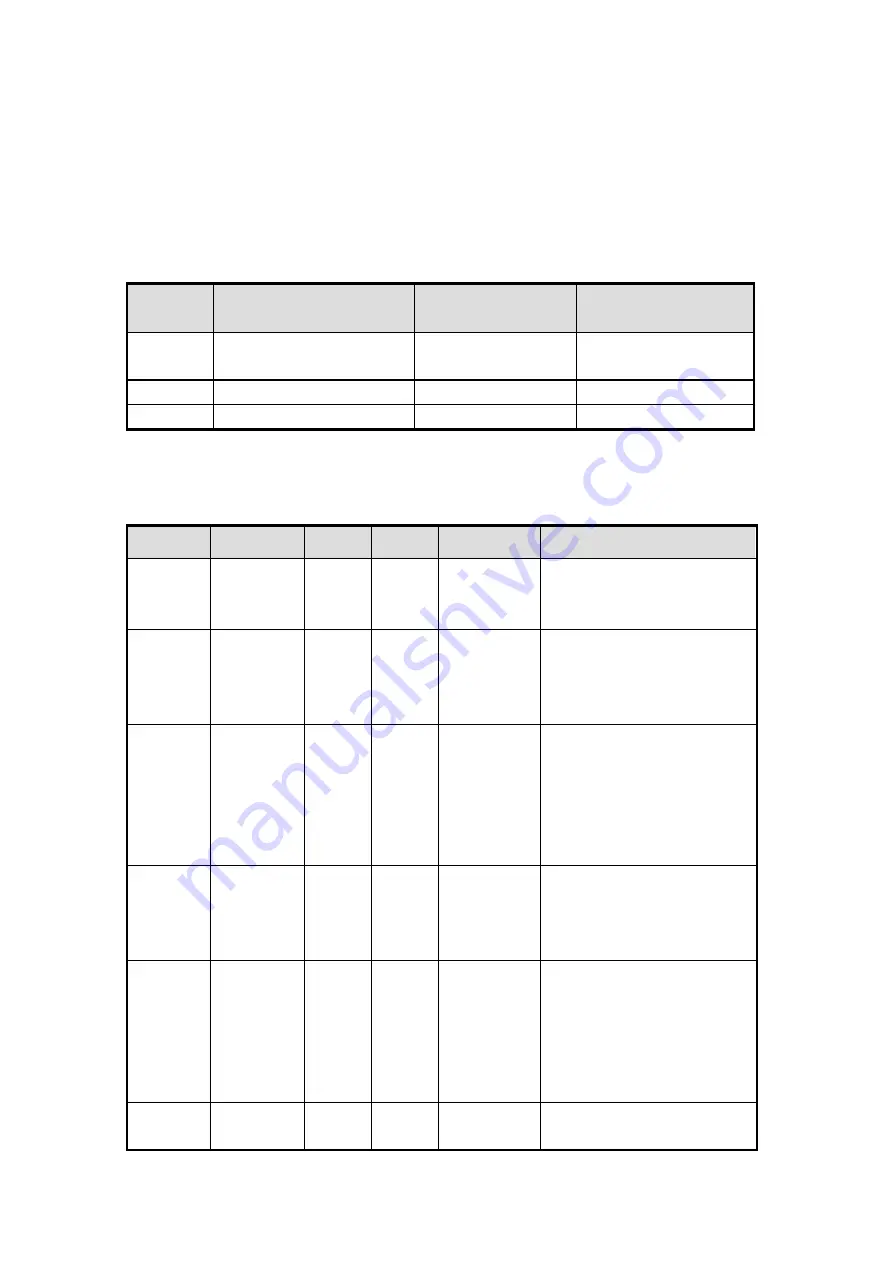
Address
Definition
1 axis to 10-axis
11-axis to 20-axis
SFD2990
Instruction refresh period
(unit: us)
3000 (default)
6000
SFD2991
Slave station number
10 (default)
20
SFD2992
Error retry time
3 (default)
3
XDC series PLC has 1-channel motion fieldbus, can connect 20-axis. The parameters of each axis
are shown as the following.
Table 4-1: basic parameters (N=1~20)
Address
definition
Type
Unit
Initial value
Notes
SFD3000
+60*(N-1)
Running
mode
16-bit
integer
0
0:
position
control
with
trajectory planning
1: interpolation position mode
SFD3002
+60*(N-1)
Encoder ppr 32-bit
integer
10000
The feedback counting value of
encoder rotating one circle. It
can modify the encoder ppr
through this parameter
SFD3004
+60*(N-1)
Moving
distance per
rotation
32-bit
integer
Pulse
number
10000
The reference equivalent of
motion (screw lead), if the unit
is pulse number, the unit is
reference moving quantity.
The pulse numbers for motor
running one circle.
SFD3010
+60*(N-1)
Origin
position
64-bit
integer
0
After returning origin, system
will
store
the
value
in
20*(N-1) to calculate
the present position
SFD3014
+60*(N-1)
Min
position
limit
32-bit
integer
Pulse
number
-1000000000 Can be determined by the
motor encoder precision. It will
produce alarm code 20002(min
soft limit over the range) when
the present position is less than
this value.
SFD3016
+60*(N-1)
Max
position
32-bit
integer
Pulse
number
1000000000
Can be determined by the
motor encoder precision. It will






















































