




























2-2-4
.
Stop running [MOSTOP]
1.
Instruction summary
This instruction can stop multi-mode motion.
Stop running [MOSTOP]
16-bit
32-bit
MOSTOP
Execution
condition
Rising/falling edge
Suitable
model
XDC
Hardware -
Software
-
2.
Operand
Operand
Function
Type
S0
Stop mode or deceleration distance
32-bit integer
S1
Axis no.
16-bit constant
3.
Suitable component
*Note:
D includes D, HD; TD includes TD, HTD; CD includes CD, HCD, HSCD, HSD; DM
includes DM, DHM; DS includes DS, DHS.
M includes M, HM, SM; S includes S, HS; T includes T, HT; C includes C, HC.
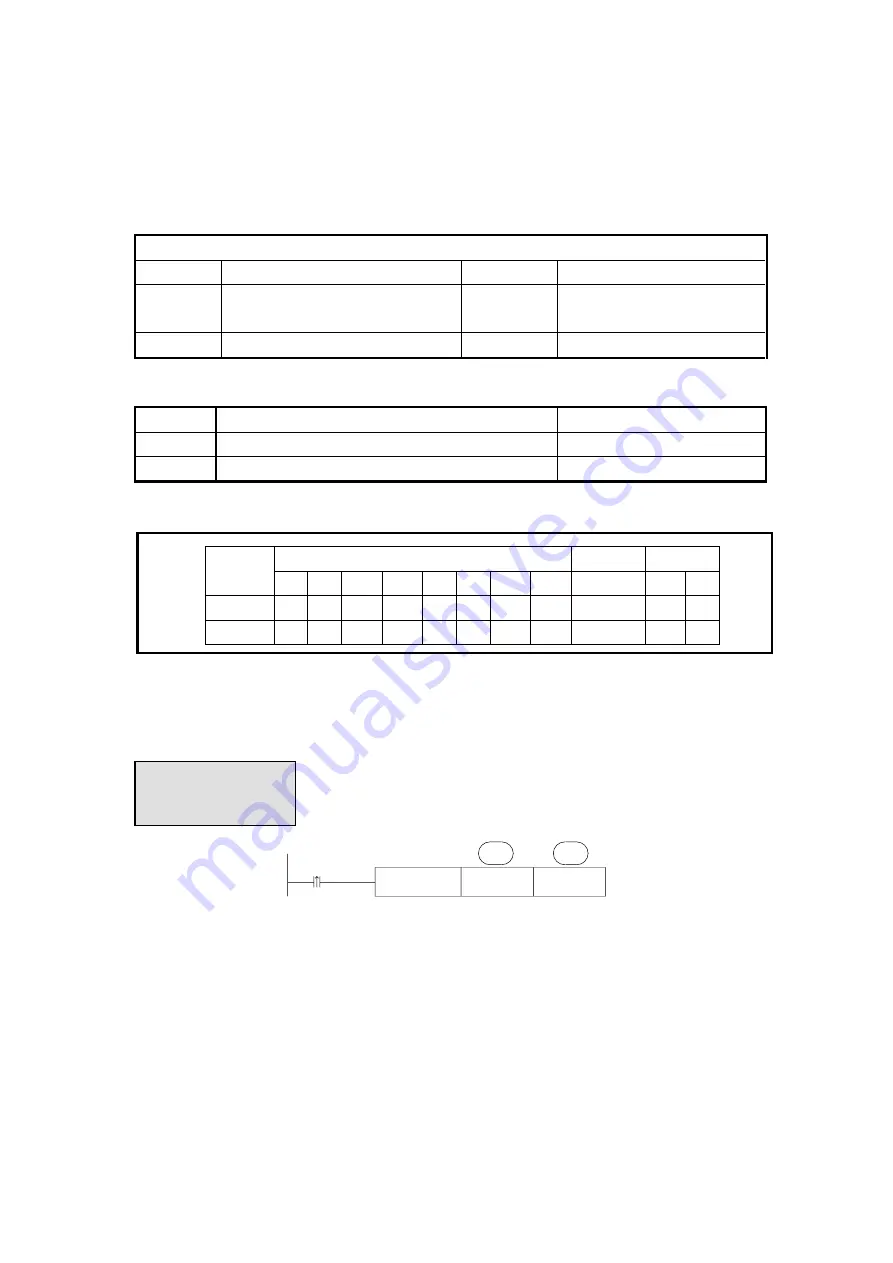
MOSTOP
HD0
M0
S1·
K1
S0·
●
when M0 is from OFF to ON, axis S1 stop running in different mode as the S0 parameters.
S0: set the pulse stop mode or deceleration distance.
S1: axis number N, N range is from 1 to 10.
●
stop mode: urgent stop, slow stop
◆
urgent stop (K-1):
When S0 is K-1, the motor urgent stop.
Function and action
Operand
System
Constant
Module
D
*
FD
TD
*
CD
*
DX
DY
DM
*
DS
*
K /H
ND
QD
S0
●
●
S1
●
Word





















































