




























incremental position based on the original position, this value will be the target position.
●
when it is running, to modify the value in register
(
60*(N-1)
)
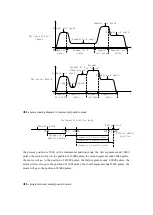
can real-time change
the absolute target position. The instruction will move to the modified target position then stop.
For example: the target position is 1000, it runs to position 600.
(1)
Change (60*(N-1)) to 400 or -400, axis S3 forward decelerate until stop, then
reverse accelerate to the position 400 or -400 and decelerate to stop. At this time change
(60*(N-1)) to 1200, axis S3 will forward run to position 1200 and decelerate to
stop.
●
servo enable, the speed register (60*(N-1)) value is 1000, when M0 from OFF to ON,
(60*(N-1)) change to S1 value.
When the motor is running, modify (60*(N-1)) can change the real-time speed, motor
will change to new speed with setting acceleration/deceleration time.
If the speed is 0, the motor will stop with deceleration time. As the speed become 0 before
reaching the target position, the motion complete flag (20*(N-1)) will not reset. At this
time, set new speed in (60*(N-1)), the motor will run again.
After PLC is running, servo is enable, modify SD register can change the target absolute position,
speed and other pararmeters, the parameters will be effective after 6~16ms. One motion filedbus
can connect 10 axes, the axis no. is 1 to 10. Please see the parameters of each axis in the following
table.
Table 1: set parameters (N=1~10)
Address
Defintion
Type
Unit
Remark
60*(N-1)
Absolute
position
32-bit
integer
Pulse
numbers
Coordinate position is calculated
from target position setting pulse
numbers. Modify the position when
stop or running, it will move toward
the setting position with setting
speed. The setting position is
absolute position.
60*(N-1)
Speed
32-bit
integer
Pulse/seco
nd
60*(N-1)
Acceleration
time
32-bit
integer
ms
The time Accelerating from 0 max
speed
60*(N-1)
Deceleration
time
32-bit
integer
ms
The time decelerating from max
speed to 0
Table 2: state bit (N=1~10)
Related register





















































