
























negative,
the
motor
run
reverse. 1: negative logic,
command speed is positive, the
motor
run
reverse,
the
command speed is negative,
the motor run forward.
SFD3048
+60*(N-1)
Positioning
finished
width initial
value
32-bit
integer
Pulse
number
10
The PLC will have positioning
finished signal in this width
range, it no needs to get the
signal after the positioning
finished.
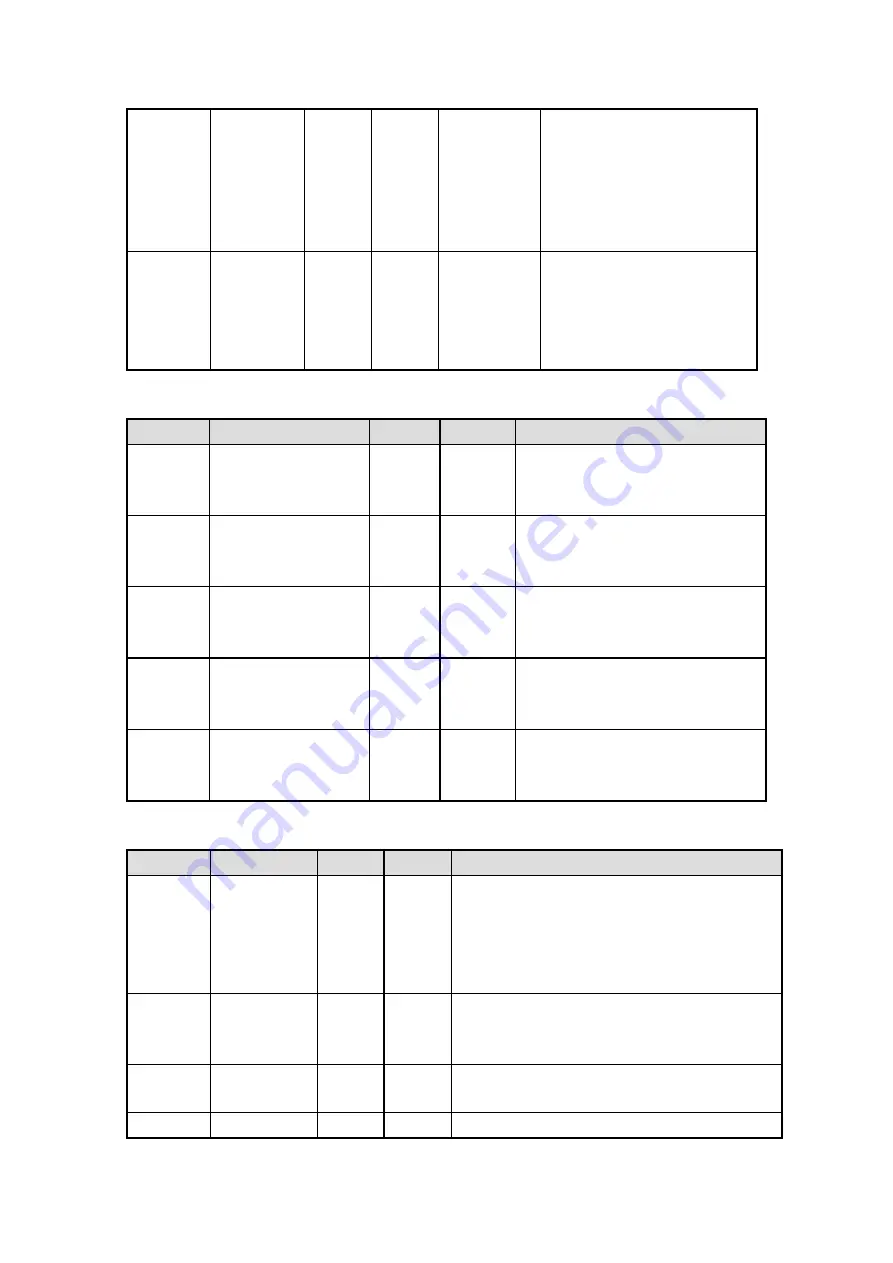
Table 4-2: state parameters (N=1~20)
Address
Definition
Model
Unit
Note
60*(N-1)
present offset
32-bit
integer
Pulse
number
The offset relative to the last time
stop position, which is the offset in
this instruction
60*(N-1)
Present position
32-bit
integer
Pulse
number
Coordinate position, calculate from
the target position feedback pulse
number
60*(N-1)
Present speed
32-bit
integer
Pulse
number/
second
Calculate the speed according to the
feedback value
60*(N-1)
Instantaneous
speed
measurement
Pulse
number
/second
The setting speed of single control
period
60*(N-1)
Present
segment
(represent segment no.
n)
32-bit
integer
Table 4-3: setting parameters (N=1~20)
Address
Definition
Model
Unit
Note
60*(N-1)
Position
setting
32-bit
integer
Pulse
number
Coordinate position, conversion of target
position setting pulse number. Change the
position setting value, the motor will move to the
setting position with the setting speed
(60*(N-1)).
60*(N-1)
Speed setting
32-bit
integer
Pulse
number
/second
60*(N-1)
Acceleration
time setting
32-bit
integer
ms
The time accelerate from 0 to the max speed
deceleration
32-bit
ms
The time decelerate from max speed to 0






















































