





























SD20-G Series
238
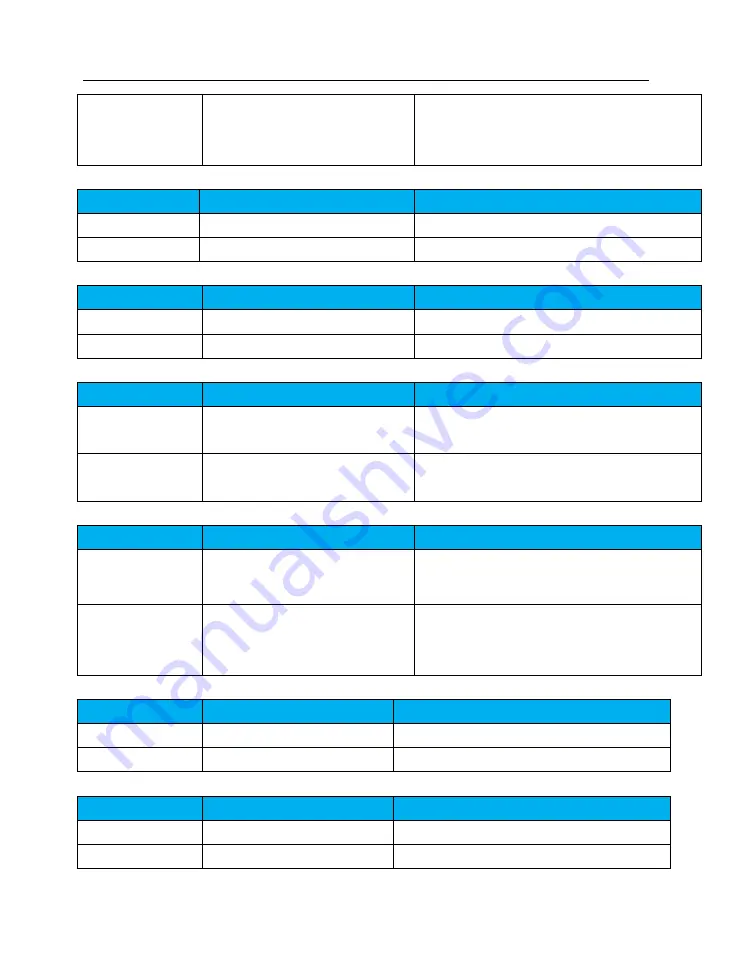
SHRDP P1 D1
Po002 Po001= Po002 Po001>>1
The content of P1 register shift right one bit, of
which high-bit stores to P2 register, low-bit stores
to P1 register;
Table 8.1.19 16-bit Signed Left Shift
Syntax Expression
Running Result
Annotations
SALWR R1 D1
R1=R1<<1
The content of R1 register shift left 1 bit;
SALWR P1 D1
Po001=Po001<<1
The content of P1 register shift left 1 bit;
Table 8.1.20 16-bit Signed Right Shift
Syntax Expression
Running Result
Annotations
SARWR R1 D1
R1=R1>>1
The content of R1 register shift right 1 bit;
SARWP P1 D1
Po001=Po001>>1
The content of P1 register shift right 1 bit;
Table 8.1.21 32-bit Signed Left Shift
Syntax Expression
Running Result
Annotations
SALDR R1 D1
R2 R1=R2 R1<<1
The content of R1 register shift left one bit, of
which high-bit stores to R2 register, low-bit stores
to R1 register;
SALDP P1 D1
Po002 Po001= Po002 Po001<<1
The content of P1 register shift left one bit , of
which high-bit stores to P2 register, low-bit stores
to P1 register;
Table 8.1.22 32-bit Unsighed Right Shift
Syntax Expression
Running Result
Annotations
SARDR R1 D1
R2 R1=R2 R1>>1
The content of R1 register shift right one bit, of
which high-bit stores to R2 register, low-bit stores
to R1 register;
SARDP P1 D1
Po002 Po001= Po002 Po001>>1
The content of P1 register shift right one bit, of
which high-bit stores to P2 register, low-bit stores
to P1 register;
Table 8.1.23 16-bit Rotate Left Shift
Syntax Expression
Running Result
Annotations
ROLWR R1 D1
R1=R1<<1
The content of R1 register shift left 1 bit;
ROLWP P1 D1
Po001=Po001<<1
The content of P1 register shift left 1 bit;
Table 8.1.24 32-bit Rotate Left Shift
Syntax Expression
Running Result
Annotations
ROLDR R1 D1
R1=R1<<1
The content of R1 register shift left 1 bit;
ROLDP P1 D1
Po001=Po001<<1
The content of P1 register shift left 1 bit;
Table 8.1.25 16-bit Rotate Rghit Shift
Summary of Contents for SD20-G Series
Page 35: ...SD20 G Series 35 M3 structure Fig 3 1 5 Servo drive structure 3...
Page 36: ...SD20 G Series 36 ML3 structure 118 5 5 7 5 93 297 8 223 118 93 0 5 12 5 7 5 4 M4...
Page 38: ...SD20 G Series 38 M4 structure Approx mass 10 365 kg Fig 3 1 7 Servo drive structure 5...
Page 39: ...SD20 G Series 39 M5 structure Approx msaa 11 1Kg Fig 3 1 8 Servo drive structure 6...
Page 40: ...SD20 G Series 40 M6 structure Approx mass 17 4Kg Fig 3 1 9 Servo drive structure 7...
Page 182: ...SD20 G Series 182 Fig 6 4 44SD20E Cam internal frameworkdiagram...







































































