





























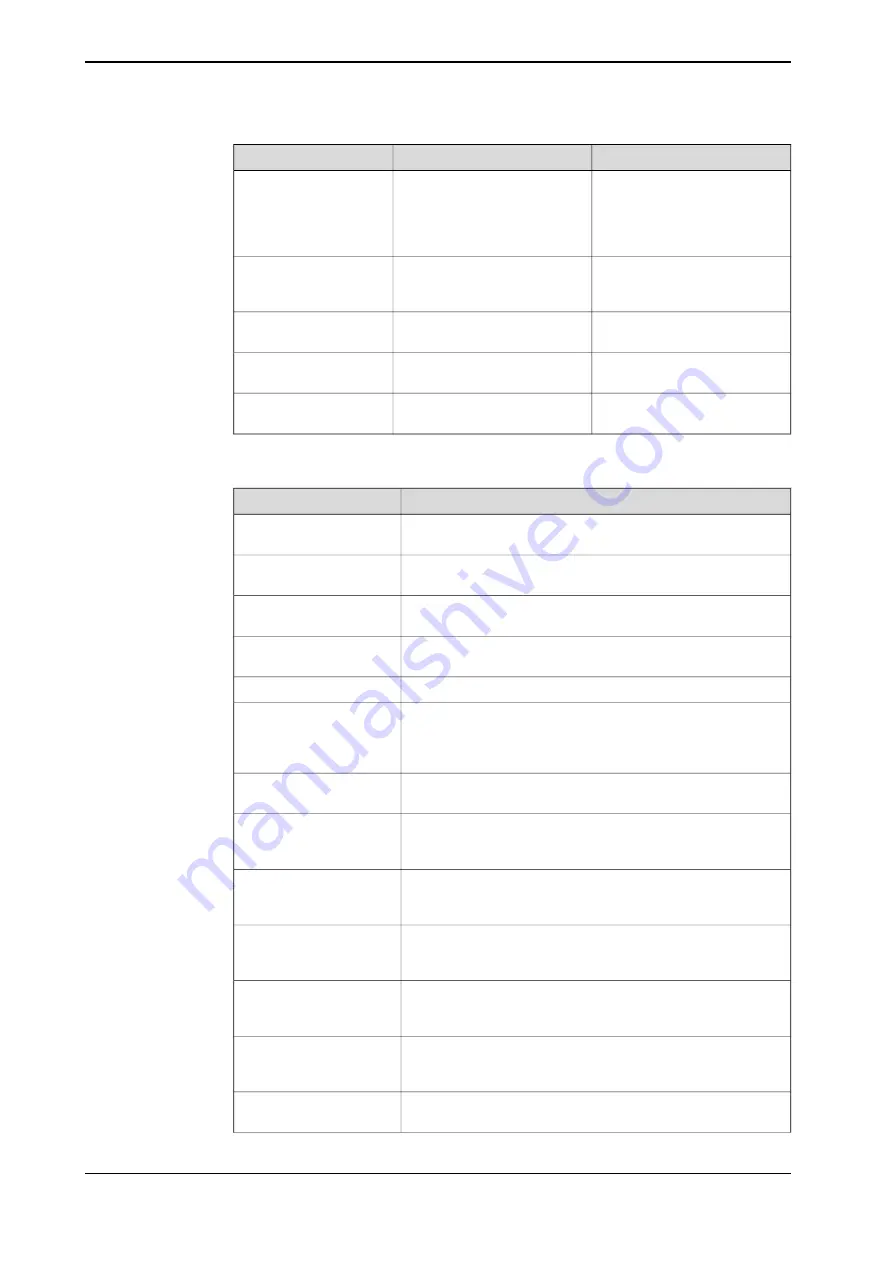
Description/result
From the robot
From FlexLoader Vision
Replaces the detail in FlexLoad-
er Vision for the specified cam-
era based on the selected ID
number, i.e. the value of
nSlaveSelectIdCam1..4
.
nSlaveSelectIdCam1..4
Sets the exposure time for
camera 1..4 within the area
0%–100%.
nExposureTimeCam1 .. 4
Sets the contrast for camera
1..4 within the area 0%–100%.
nContrastCam1..4
Sets the gain for camera 1..4
within the area 0%–100%.
nGainCam1..4
Resets the previous information
on already picked details.
bResetPickedCam1..4
The following status signals are used in the communication. The signals are digital
outputs and must be defined in the robot.
Description
Signal
Used to signal to the robot program that new coordinates are
available.
DOF_Coord
Cross-connected to the system output
MotSupTrigg
. Used so
that FlexLoader Vision can receive the collision information.
DOF_MotSupTrigg
Cross-connected to the system output
Error
. Used so that
FlexLoader Vision can receive information about fault incidents.
DOF_Error
Used so that FlexLoader Vision can stop the robot when a cor-
rect cycle is completed and not in the middle of a cycle.
DOF_EndCycle
Response signal from robot on
DOF_EndCycle
.
DOF_CycleEnded
Cross-connected to the system output
CycleOn
. This signal is
checked before the coordinates are sent. If the robot is not
running, an alarm is displayed and FlexLoader Vision waits
until the robot program starts again before coordinates are sent.
DOF_CycleOn
Cross-connected to the system output
AutoOn
. This signal is
checked upon startup and stop through FlexLoader Vision.
DOF_AutoOn
Cross-connected to the system input
ResetEStop
. Used so that
FlexLoader Vision can automatically start the robot motors after
an emergency.
DOF_ResetEStop
Cross-connected to the system input
MotorOn
. Used so that
FlexLoader Vision at the selected option can start the robot via
system inputs.
DOF_ MotorsOn
Cross-connected to the system input
MotorOn
. Used so that
FlexLoader Vision at the selected option can start the robot via
system inputs.
DOF_ StartAtMain
Cross-connected to the system input
MotorOn
. Used so that
FlexLoader Vision at the selected option can stop the robot via
system inputs.
DOF_ StopEndInstr
Cross-connected to the system input
MotorOn
. Used so that
FlexLoader Vision at the selected option can start the robot via
system inputs.
DOF_ MotOnStart
Cross-connected to
RunFeeder1...4
. Used by
VisionCom
to
run supply equipment under camera 1-4.
DOF_RunFeeder1...4
Continues on next page
210
Product manual - FlexLoader Vision
3HAC051771-001 Revision: B
© Copyright 2014-2018 ABB. All rights reserved.
13 Robot integration
13.4.1 Communication between FlexLoader Vision and the robot
Continued
Summary of Contents for FlexLoader Vision
Page 1: ...ROBOTICS Product manual FlexLoader Vision ...
Page 8: ...This page is intentionally left blank ...
Page 12: ...This page is intentionally left blank ...
Page 14: ...This page is intentionally left blank ...
Page 16: ...This page is intentionally left blank ...
Page 62: ...This page is intentionally left blank ...
Page 96: ...This page is intentionally left blank ...
Page 180: ...This page is intentionally left blank ...
Page 218: ...This page is intentionally left blank ...
Page 286: ......
Page 287: ......






































































