


















The module contains a number of predefined procedures or functions for
communication with the machine tool:
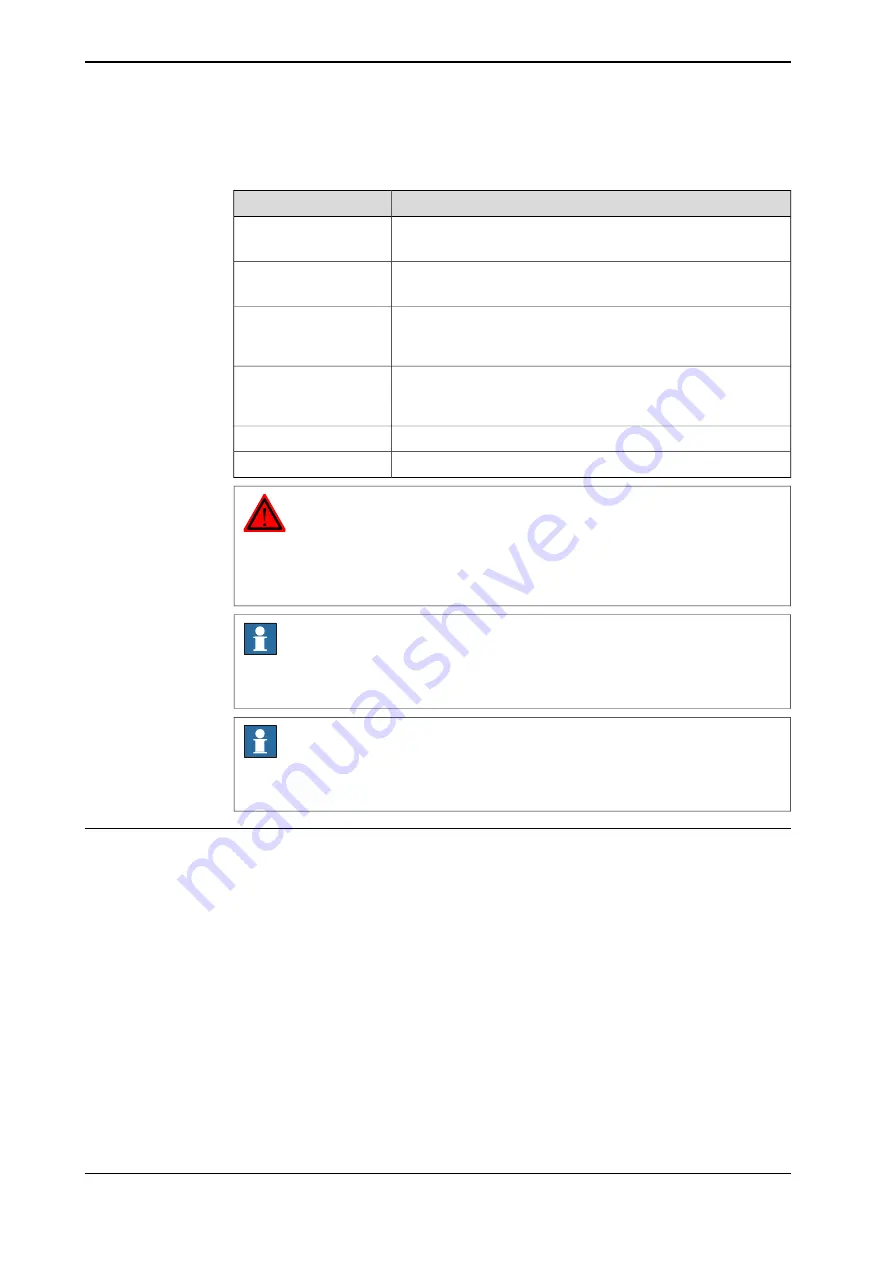
Description
Name
Initiates what is necessary for machine handling. Sets up traps.
PROC InitMachine
NEEDED: Set up correct signals for interrupt handling.
Performs desired machine tool action.
PROC Machine1Action
(string sAction)
NEEDED: Define signals and communicate with machine tool.
Checks machine tool and conditions and returns correct state
for use in main flow of program.
FUNC bool Ma-
chine1Check (string
sCheck)
NEEDED: Define signals and communicate with machine tool.
Waits for machine condition to be ok within
nMaxTime
. Returns
false if
nMaxTime
elapses.
FUNC bool Ma-
chine1Wait (string
sWait,num nMaxTime)
NEEDED: Define signals and communicate with machine tool.
Support routine for calibration of a lathe main chuck.
PROC CalibMainChuck
Support routine for calibration of a lathe sub chuck.
PROC CalibSubChuck
DANGER
Ensure that the standard features in
Machine1Action
,
Machine1Check
and
Machine1Wait
are correctly implemented. Malfunction and collisions might
otherwise occur.
Note
We recommend the use of an additional background task if the robot cell requires
time critical machine tool communication.
Note
Operation with more than one machine requires the creation of these routines
with equivalent names, e.g. Machine2Action and Machine3Wait.
States and actions
This module uses a number of predefined states and actions that are consistently
used. If needed, new values can be added in GlobalCodeAndConfig.sys. However,
do not remove the existing values, as these are used in the FlexLoader core
functionality.
Examples for predefined values are:
•
Examples for predefined machine checks/waits:
DOOR_OPENED, PREPICK_OK, LOAD_SUB_OK, LOAD_MAIN_OK,
UNLOAD_SUB_OK, UNLOAD_MAIN_OK, HOME_POSITION_OK,
MAIN_CHUCK_OPENED, MAIN_CHUCK_CLOSED, SUB_CHUCK_OPENED,
SUB_CHUCK_CLOSED
•
Examples for predefined machine actions:
CLOSE_CHUCK_MAIN, CLOSE_CHUCK_SUB, CLOSE_DOOR,
OPEN_CHUCK_MAIN, OPEN_CHUCK_SUB, OPEN_DOOR,
Continues on next page
284
Product manual - FlexLoader Vision
3HAC051771-001 Revision: B
© Copyright 2014-2018 ABB. All rights reserved.
B FlexLoader RAPID reference
B.7 FlexLoader machine tool interface functionality
Continued
Summary of Contents for FlexLoader Vision
Page 1: ...ROBOTICS Product manual FlexLoader Vision ...
Page 8: ...This page is intentionally left blank ...
Page 12: ...This page is intentionally left blank ...
Page 14: ...This page is intentionally left blank ...
Page 16: ...This page is intentionally left blank ...
Page 62: ...This page is intentionally left blank ...
Page 96: ...This page is intentionally left blank ...
Page 180: ...This page is intentionally left blank ...
Page 218: ...This page is intentionally left blank ...
Page 286: ......
Page 287: ......







































































