





























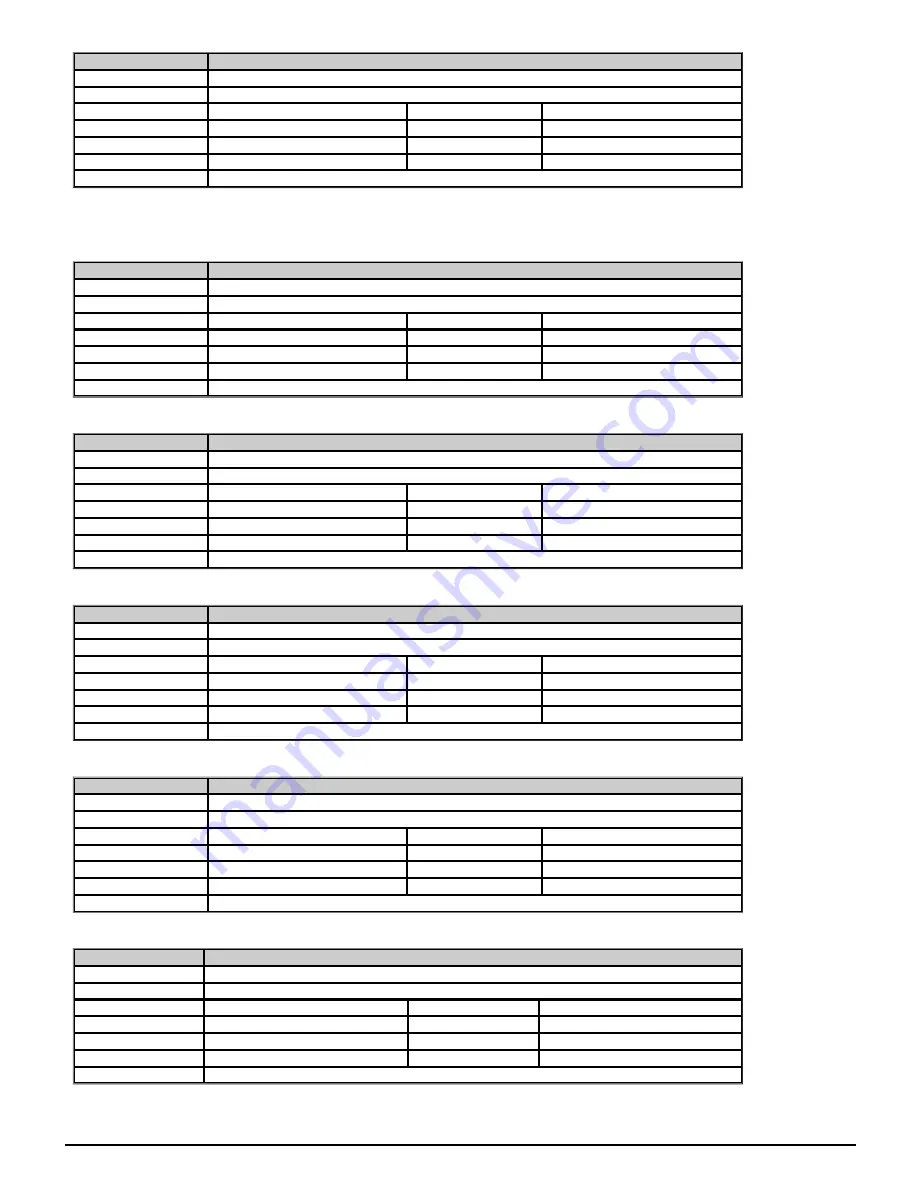
Parameter
21.015
Motor 2 Active
Short description
Indicates if motor 2 parameters are being used by the drive
Mode
Open
‑
loop
Minimum
0
Maximum
1
Default
Units
Type
1 Bit Volatile
Update Rate
Background write
Display Format
Standard
Decimal Places
0
Coding
RO, ND, NC, PT
If
Motor 2 Active
(21.015) = 0 then the standard motor set-up parameters are being used or if
Motor 2 Active
(21.015) = 1 then the motor 2 parameters
are being used. The motor set-up parameters do not necessarily change immediately when
Select Motor 2 Parameters
(11.045) is changed (i.e. the
drive may be enabled).
Motor 2 Active
(21.015) shows the actual motor parameters being used and only changes when the new parameters start being
used by the drive.
Parameter
21.016
M2 Motor Thermal Time Constant 1
Short description
Defines the thermal time constant of the motor used for motor map 2
Mode
Open
‑
loop
Minimum
1
Maximum
3000
Default
179
Units
s
Type
16 Bit User Save
Update Rate
Background read
Display Format
Standard
Decimal Places
0
Coding
RW
This is the motor map 2 equivalent of
Motor Thermal Time Constant 1
(04.015).
Parameter
21.022
M2 Current Controller Kp Gain
Short description
Defines the Kp value of the current controller used for motor map 2
Mode
Open
‑
loop
Minimum
0.00
Maximum
4000.00
Default
20.00
Units
Type
32 Bit User Save
Update Rate
Background read
Display Format
Standard
Decimal Places
2
Coding
RW
This is the motor map 2 equivalent for
Current Controller Kp Gain
(04.013).
Parameter
21.023
M2 Current Controller Ki Gain
Short description
Defines the Ki value of the current controller used for motor map 2
Mode
Open
‑
loop
Minimum
0.000
Maximum
600.000
Default
40.000
Units
Type
32 Bit User Save
Update Rate
Background read
Display Format
Standard
Decimal Places
3
Coding
RW
This is the motor map 2 equivalent for
Current Controller Ki Gain
(04.014).
Parameter
21.024
M2 Stator Inductance
Short description
Defines the stator inductance of the motor used for motor map 2
Mode
Open
‑
loop
Minimum
0.00
Maximum
5000.00
Default
0.00
Units
mH
Type
32 Bit User Save
Update Rate
Background read
Display Format
Standard
Decimal Places
2
Coding
RW, RA
This is the motor map 2 equivalent for
Stator Inductance
(05.025).
Parameter
21.027
M2 Motoring Current Limit
Short description
Defines the motoring current limit used for motor map 2
Mode
Open
‑
loop
Minimum
−VM_MOTOR2_CURRENT_LIMIT
Maximum
VM_MOTOR2_CURRENT_LIMIT
Default
165.0
Units
%
Type
16 Bit User Save
Update Rate
16ms
Display Format
Standard
Decimal Places
1
Coding
RW, VM, RA
This is the motor map 2 equivalent for
Motoring Current Limit
(04.005).
226
Unidrive M200 Parameter Reference Guide
Issue: 01.05.00.10
Summary of Contents for unidrive m200
Page 1: ...Parameter Reference Guide Unidrive M200 Open loop Mode Issue 01 05 00 10 ...
Page 30: ...30 Unidrive M200 Parameter Reference Guide Issue 01 05 00 10 ...
Page 83: ...Enable logic Unidrive M200 Parameter Reference Guide Issue 01 05 00 10 83 ...
Page 125: ...Unidrive M200 Parameter Reference Guide Issue 01 05 00 10 125 ...
Page 145: ...Unidrive M200 Parameter Reference Guide Issue 01 05 00 10 145 ...
Page 204: ...204 Unidrive M200 Parameter Reference Guide Issue 01 05 00 10 ...







































































