





























C
ONFIGURATION
C
OMMAND
S
ET
- F
IRMWARE
R
EVISION
2.4.0_
BETA
-
V
ERSION
1.0.0
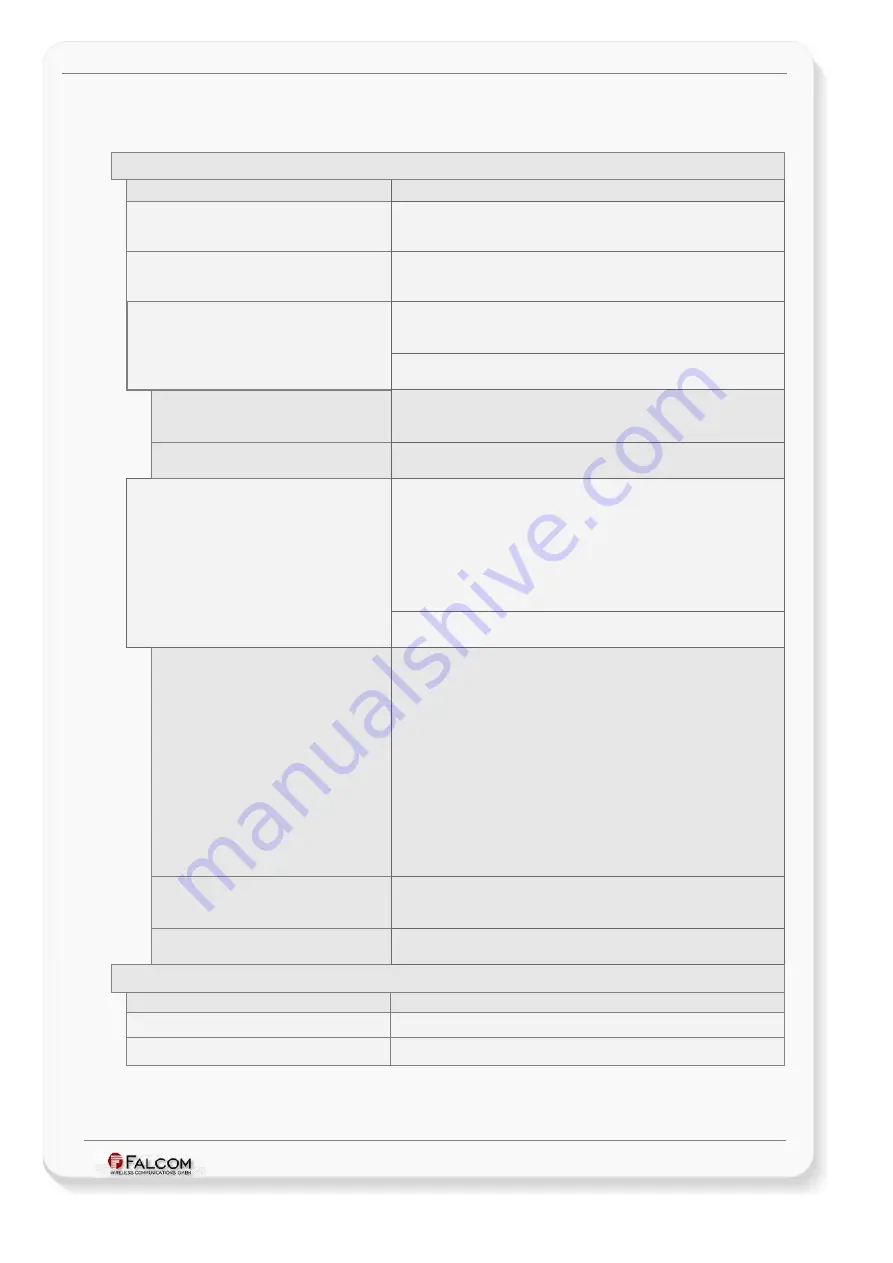
3.2.25.1.1.5 GPS (GPS states and events)
3.2.25.1.1.5.1
GPS.Nav (Navigation states and events)
STATES
-
are checked every second
State notification code
Meaning
GPS.Nav.sFix=valid
True when the device obtains a valid GPS-fix (GPS data goes from
invalid to valid) until it loses that fix. State is checked every second.
This state is
configuration-dependant.
GPS.Nav.sFix=invalid
True when the device loses a valid GPS-fix (GPS data goes from valid
to invalid) until the GPS-fix available again. State is checked every
second.
GPS.Nav.sSpeed<
comp
><
value
>
True when the current speed of the vehicle matches the user-
specified value. The set cooperator determines how the comparison of
both values will take place. State is checked every second.
Example:
GPS.Nav.sSpeed>=36
How to use such a state refer to the chapters
, page
<
comp
>
Compares two values and return a Boolean (True/False) value that
represents the result of the comparison. It can be set to =, !=, <, >, <=
or >=.
<
value
>
Set a value of speed, in metres per second, between
0
and
2147483647
that matches your application.
GPS.Nav.Position.s<
buffer_index
><
comp
><
v
alue
>
True when the distance travelled from a stored point (position
<
buffer_index
>) matches the user-defined value. The set cooperator
determines how the comparison of both values will take place. State is
checked every second.
Hint:
This state can be used to collect detailed information about
individual vehicles. In combination with a counter it is possible to
calculate the distance the device has travelled since, for example, the
MAMBOII unit was turned on. (= the driven kilometres without
breaks).
Example:
GPS.Nav.Position.s1=10000
How to use such a state, refer to the chapters
, page
<
buffer_index
>
Specifies the buffer identifier. A number form
0
to
4
. The system gets
the contents of the defined buffer index and calculates the distance
the MAMBOII device has moved from that point.
A GPS position can be temporarily stored using the following
command:
GPS.Nav.Position<buffer_index>=<type>
A GPS position can be permanently stored using the following
command, if the content of <buffer_index
is not empty.
GPS.Nav.Position<buffer_index>=save<storage_index>
You may define an alarm that loads the contents of the
<storage_index> into the <buffer_index> whenever system starts up.
GPS.Nav.Position<buffer_index>=load<storage_index>.
After loading the contents of the <storage_index> into the
<buffer_index>, then you may use this state to determine
disagreements between the user defined values and the contents of
the <buffer_index>.
<
comp
>
Compares two values and return a Boolean (True/False) value that
represents the result of the comparison. It can be set to =, !=, <, >, <=
or >=.
<
value
>
Set the value of the distance, in meter, between
0
and
2147483647
that matches your application.
EVENTS
-
are evaluated just when the event occurs
Event notification code
Description
GPS.Nav.eFix=valid
Occurs when four or more GPS satellites are used.
GPS.Nav.eFix=invalid
Occurs when three or less GPS satellites are used. (GPS position goes
from valid to invalid).
Table 28:
Navigation states and events.
This confidential document is a property of FALCOM and may not be copied or circulated without previous permission.
Page 221 of 271







































































