





























Parameter Description
Parameters
142
contravariance
convertor
Output
frequency
5
4
IM
U/T1
W/T3
V/T2
feedback
quantity
R/L1
S/L2
+
-
Target
value
K
I
=P.173
K
P
=P.172
K
D
=P.174
+
+
+
limit
P.182
PID module
e(t)
Feedback value
2
filter
T/L3
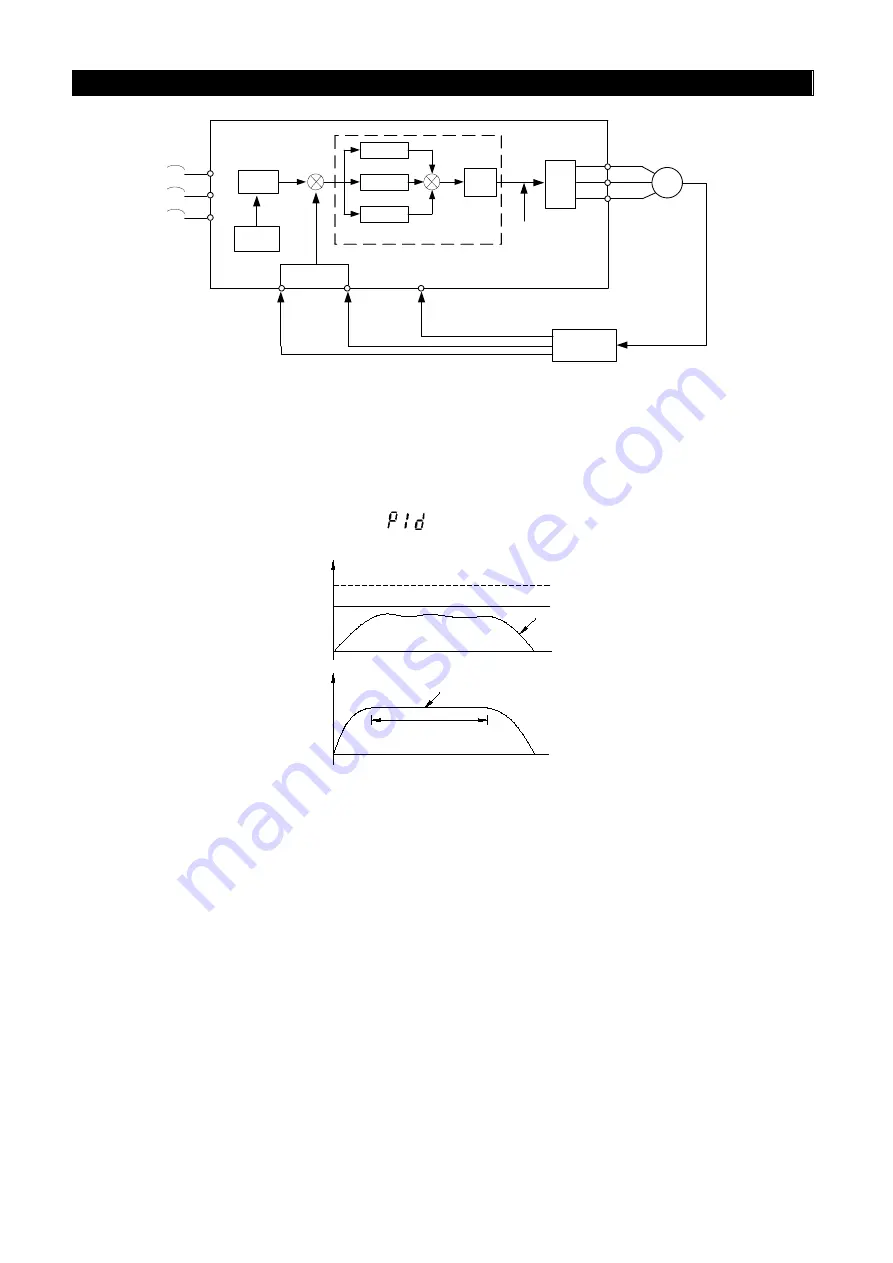
● When the output frequency reaches the value of P.3*P.182, the feedback value will be less
than the product of the target value and P.172. In addition, when the duration lasts more
than the set value of P.176, PID will be considered as abnormal and handled according to
the set value of P.177.
For example, when P.175=60%, P.176=30s, P.177=0 and P.182=50Hz, the output
frequency reaches 50Hz, and the feedback value is lower than 60% of the target feedback
value for 30 seconds continuously,
alarm will be display and the inverter will be
stopped freely.
the target
feel-back
value
the feel-back
value
Maximum frequency
P.176
0HZ
● If P.176 is set to 0, then the set values of P.179, P.180, P.181 and P.183 are invalid. If the
set value of P.178 is nonzero, than PID’s sleep function will be activated. When the
absolute value of the deviation between the feedback value and the target feedback value
is less than the sleep detected deviation value for the duration of P.179’s sleep detection
time, the inverter will steadily reduce the output frequency. Once the output frequency of
the inverter is less than the machine stop level of P.181, the inverter will decelerate and
stop. When the feedback value is lower than the wake-up level, the output frequency of
the inverter will again be controlled by PID.
For example, if P.178=5%, P.179=1.0s, P.180=90%, P.181=40Hz, and P.183=0.5Hz, and
when the feedback value is at a stable zone, i.e., larger than 95% of the target feedback
value but less than 105% of the target feedback value, the inverter at the stable zone will
reduce the output frequency by 0.5Hz/second. When the output frequency of the inverter
is less than 40Hz, the inverter will directly decelerate and stop. When the feedback value
lower than 90% of the target feedback value, the inverter will wake up and the output
frequency will again be controlled by PID.







































































