





























Settings
EFORT INTELLIGENT EQUIPMENT CO.,LTD
176
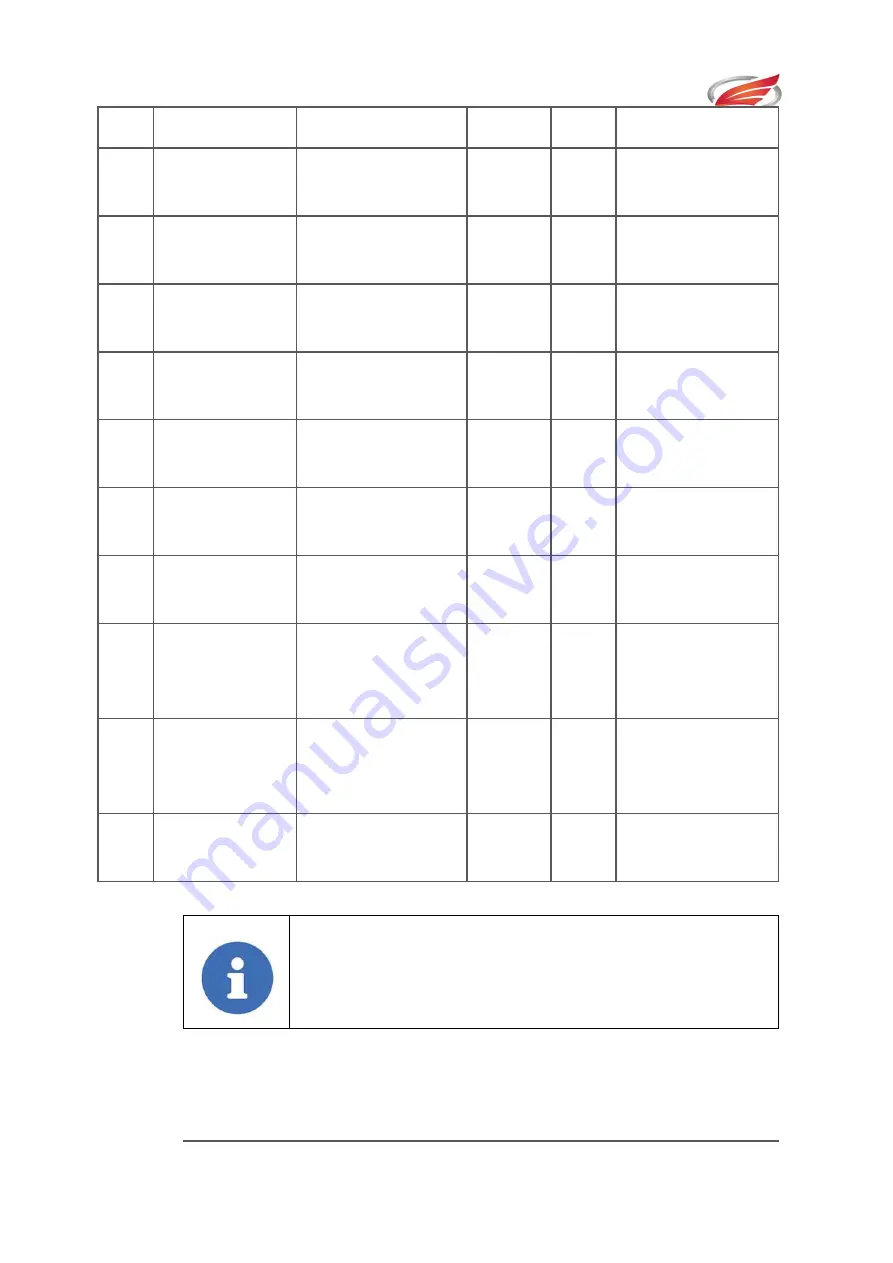
21
Error message
strErrorText
string
128
22
Angle of each
axis
dbAxisPos[0..6]
float
4*7
Degree (unit)
23
Posture and pos
ition
dbCartPos[0..5]
float
4*6
Mm | degree (uni
t)
24
Speed of each
axis
dbAxisVel[0..6]
float
4*7
Degrees per secon
d (units)
25
Acceleration of
each axis
dbAxisAcc[0..6]
float
4*7
Degrees / second
^ 2 (units)
26
Jerk of each ax
is
dbAxisJer[0..6]
float
4*7
Degrees / second
^ 3 (units)
27
Torque of each
axis
dbAxisTor[0..6]
float
4*7
Percentage of rate
d torque (unit)
28
Reverse countin
g of each axis
nAxisDirCnt[0..6]
unsigne
d int
4*7
Times (unit) statist
ics
29
Total working
hours of each a
xis
nAxisTime[0..6]
unsigne
d int
4*7
Seconds (unit) stat
istics
30
Total time of e
quipment startu
p
nDeviceTime
unsigne
d int
4
Seconds (unit) stat
istics
31
End tag of pac
ket
Packet_End
string
16
MessageTail
Notes!
“Data heartbeat” needs to send the received data heartbeat value.
Additional axis protocol content
Table 5-28 MES system of main-robot





































































